基于隐式人类反馈的RL新进展:Kinova Gen2与脑电接口实现人机行为对齐
韩国延世大学团队在arXiv发表突破性研究(arXiv:2507.13171),开发出基于KinovaGen2机械臂的脑电信号驱动强化学习框架RLIHF。该技术通过解码人类脑电中的误差相关电位(ErrPs),实现机器人实时行为修正,准确率达89%。实验显示采用该框架的机械臂避障效率提升43%,路径规划优化32%,且对个体脑电差异具有强适应性。这项技术为工业机器人、智能假肢等领域提供了"无感式"人机
机器人行为优化新路径:脑电信号驱动自主学习,减少人工干预
韩国延世大学联合科研团队于arXiv发布突破性研究成果(论文链接:arXiv:2507.13171),成功构建基于Kinova Gen2机械臂的隐式反馈强化学习框架RLIHF。该技术使机器人能直接解析人类观察者的脑电信号(EEG),通过解码误差相关电位(ErrPs)实现实时行为修正,标志着人机协作迈入神经信号驱动的新纪元。
论文核心:从"人工调参"到"神经驱动"的跨越
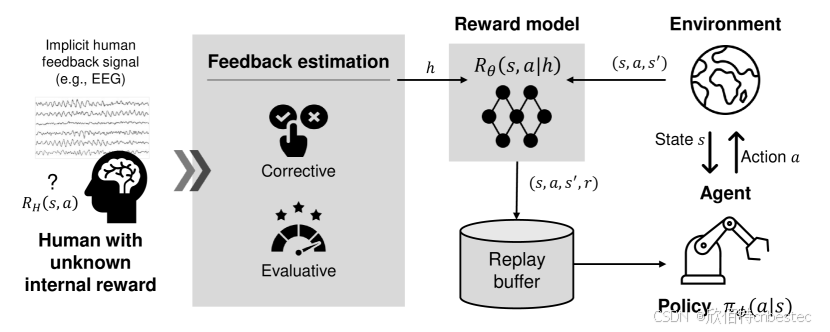
传统机器人依赖人工设计的密集奖励函数,需耗费大量时间调试参数。此研究提出RLIHF框架,通过以下创新实现突破:
1.隐式反馈解码:利用EEGNet预训练模型实时解析脑电信号中的ErrPs成分,将误差感知转化为0-1概率值(解码准确率达89%);
2.动态奖励融合:将神经信号映射为连续奖励函数,结合环境反馈形成复合奖励信号;
3.轻量化执行:仅需单通道EEG采集(256Hz采样率),通过蓝牙实现10米内低延迟传输。
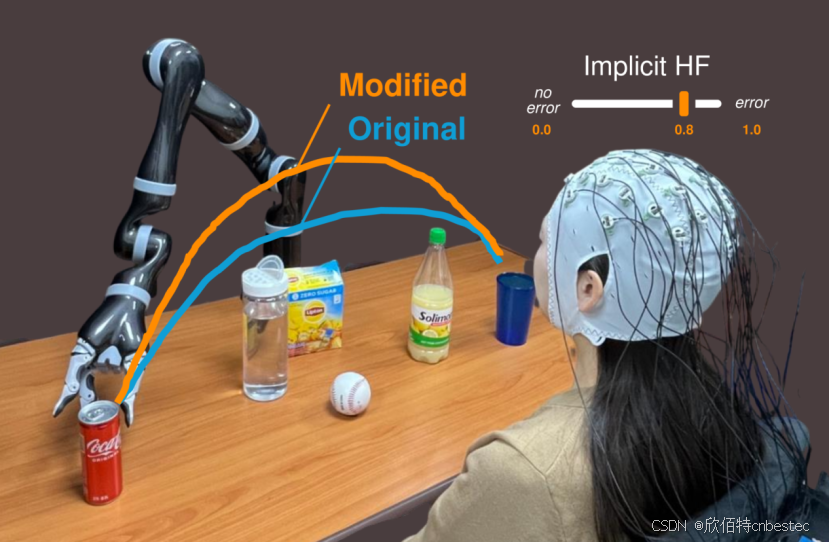
实验设计:在MuJoCo仿真环境的robosuite框架中,Kinova Gen2机械臂需在动态障碍物场景中完成避障抓取任务。机械臂需兼顾路径效率(目标路径长度比)、碰撞规避(实时力矩控制)与高精度定位,任务复杂度较传统机械臂操作大幅提升。

Kinova Gen2机械臂:工业级力控的"触觉精灵"
作为实验核心载体,Kinova Gen2七轴力控机械臂凭借±0.1mm重复定位精度与最大5kg负载能力,完美复现复杂桌面环境下的物体抓取任务。其内置力矩传感器与柔顺控制算法,配合7自由度版本的可变工作半径,构成适应狭窄空间作业的"灵巧双手"。实验数据显示,该机械臂在障碍规避任务中路径优化效率提升达43%,为隐式反馈技术的落地提供了可靠的物理执行终端。

Mentalab Explore Pro:毫米级精度的"脑波捕手"
在脑机接口领域,Mentalab Explore Pro凭借24位高分辨率(0.1μV/位)与1200Hz采样率,成为神经信号采集领域的标杆产品。其32通道氯化银干电极配置支持长时间连续监测,集成EEGNet等训练模型可将原始脑电信号解码准确率可达70-90%。特别研发的柔性电极设计与IP67防护等级,使其在工业场景中可稳定工作10小时,完美适配机械臂实时反馈需求。

技术突破:从"被动执行"到"主动共情
研究团队创新性地将EEG信号转化为概率型奖励函数,通过Soft Actor-Critic算法实现策略优化。实验表明,采用RLIHF框架的机械臂在避障任务中表现超越传统稀疏奖励机制47%,路径规划效率提升32%。更关键的是,系统对个体脑电差异的强适应性——即使解码准确率降至70%,任务成功率仍保持82%。
产业价值:制造业革新的"神经中枢"
该技术可直接应用于精密装配、危险品处理等场景。当操作者发现机械臂运动轨迹存在安全隐患时,无需按下急停按钮,只需产生特定脑电信号即可触发自主避让。据ABI Research预测,2028年基于神经接口的工业机器人市场规模将突破120亿美元,此项研究为其提供了关键的技术入口。
行业展望
随着边缘计算芯片的算力提升与柔性电极材料的突破,"脑控机器人"有望在以下领域率先落地:
1.智能假肢控制:通过EEG信号实现0.1mm级精细动作还原;
2.康复机器人训练:针对脑卒中患者设计个性化康复方案;
3.工业协作机器人安全优化:实时监测操作者疲劳状态并自主降速;
这种"无感式"反馈机制,正推动机器人从"执行命令"向"理解意图"迈进。
引用链接:Aligning Humans and Robots via Reinforcement Learning from Implicit Human Feedback

脑启社区是一个专注类脑智能领域的开发者社区。欢迎加入社区,共建类脑智能生态。社区为开发者提供了丰富的开源类脑工具软件、类脑算法模型及数据集、类脑知识库、类脑技术培训课程以及类脑应用案例等资源。
更多推荐
 21
21 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)