焊缝跟踪 abb机器人二次开发 上位机由C#+halcon联合编程 提供源码讲解
该上位机系统成功实现了视觉引导—特征识别—位姿解算—轨迹规划—机器人控制采用亚像素级激光中心线提取,提升定位精度;创新性地通过向量法解析 V 型焊缝角度,实现焊枪姿态自动纠偏;设计动态拟合+转弯半径的实时跟踪算法,兼顾精度与平滑性;模块化架构便于功能扩展与维护。未来可进一步优化方向包括:引入深度学习提升复杂焊缝识别鲁棒性、集成真实焊接过程中的弧光抑制算法、以及研究热变形补偿模型,使系统更贴近工业现
焊缝跟踪 abb机器人二次开发 上位机由C#+halcon联合编程 提供源码讲解,abb编程及通讯、工业相机标定、halcon图像处理、C#与halcon联合编程等
引言
在智能制造与工业自动化的浪潮中,焊接机器人正逐步取代传统人工焊接,成为装备制造业的关键执行单元。然而,传统示教再现型焊接机器人难以应对加工误差、装夹偏差及热变形等动态扰动,导致焊缝轨迹偏移,影响焊接质量。为解决这一问题,基于视觉引导的焊缝实时跟踪技术应运而生。
焊缝跟踪 abb机器人二次开发 上位机由C#+halcon联合编程 提供源码讲解,abb编程及通讯、工业相机标定、halcon图像处理、C#与halcon联合编程等
本文结合沈阳工业大学陈东旭硕士论文《基于视觉引导的机器人焊缝跟踪研究》及其配套上位机源码(C# + Halcon 联合开发),深入剖析该系统的软件架构与核心功能模块,重点阐述其如何实现从图像采集、特征提取、坐标转换到机器人运动控制的完整闭环流程。
系统整体架构
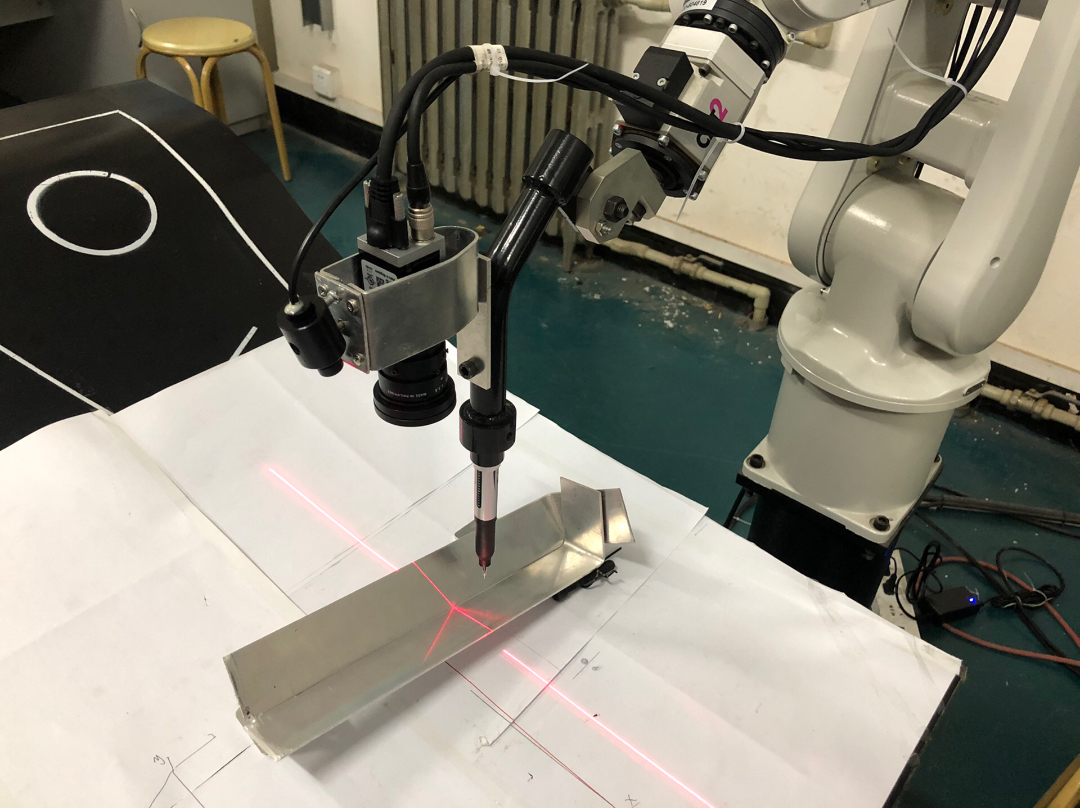
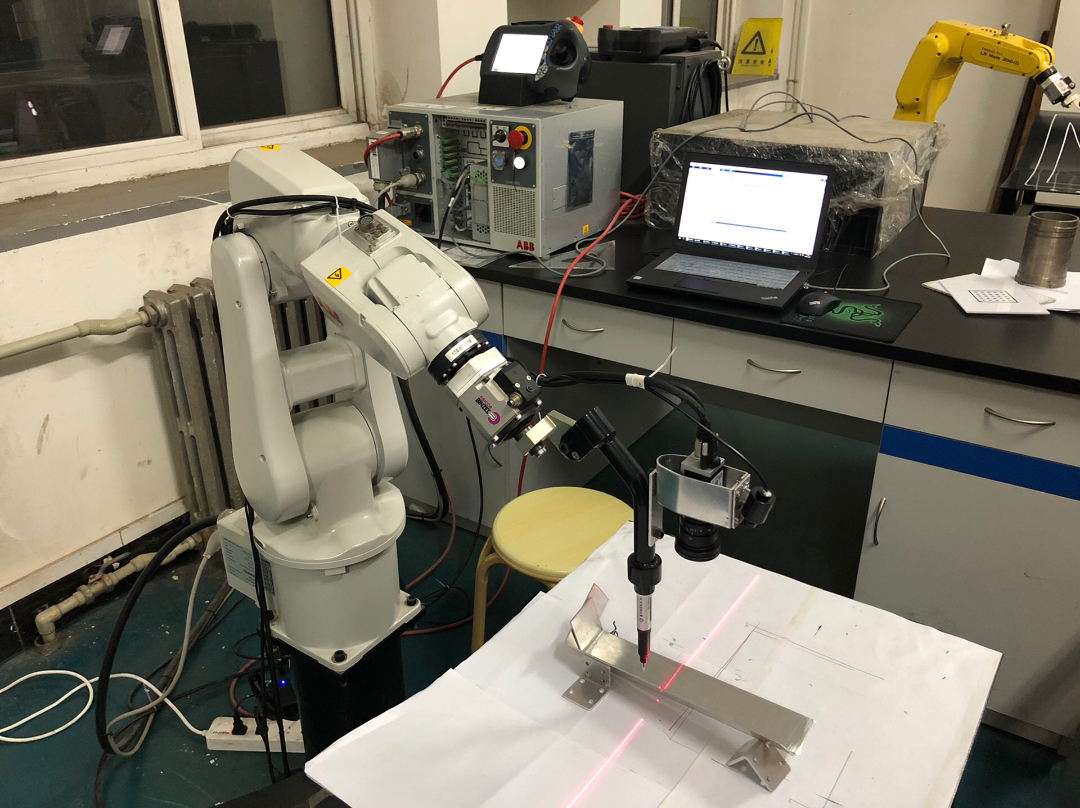
该上位机系统采用 C/S(客户端/服务器)架构,以 Windows Forms 为界面载体,C# 为逻辑控制语言,Halcon 作为底层图像处理引擎,通过 TCP/IP 协议与 ABB IRB120 工业机器人控制柜通信,构成一个集 视觉标定、图像处理、轨迹拟合、运动控制于一体的焊缝跟踪平台。
系统主要由以下六大功能模块组成:
- 通讯模块:建立与机器人控制柜的稳定数据通道;
- 示教模块:支持关节/直角坐标下的手动点位控制;
- 相机标定模块:完成内参、外参与手眼关系标定;
- 图像采集模块:实时显示工业相机画面;
- 数据处理模块:执行焊缝特征识别与三维位姿计算;
- 焊缝跟踪模块:支持离线扫描与实时跟踪两种模式。
核心功能流程详解
1. 视觉系统标定流程
系统采用 张正友标定法结合 线结构光平面拟合 与 手眼标定,构建从像素坐标到机器人基坐标系的完整映射链。
- 相机标定:通过 Halcon 标定助手,采集多角度标定板图像,计算相机内参(焦距、主点、畸变系数)及每帧图像对应的外参。
- 结构光标定:将线激光投射至标定板,提取激光条纹与标定网格交点,利用最小二乘法拟合出激光平面在相机坐标系下的方程。
- 手眼标定:采用“AX = XB”模型,通过机器人多姿态运动,解算相机相对于焊枪(工具坐标系)的旋转与平移关系。
标定结果以 `.dat` 和 `.tup` 文件形式持久化存储,供后续图像处理调用。
2. 焊缝特征点识别流程
系统针对 V 型焊缝 设计了鲁棒的图像处理流水线:
- 图像预处理:
- 使用 9×9 均值滤波 去除高频噪声;
- 通过 灰度强调(Emphasize) 提升激光条纹对比度;
- 转换为灰度图以简化后续处理。
- 感兴趣区域(ROI)动态选取:
- 首帧采用固定矩形 ROI;
- 后续帧以历史特征点为中心生成圆形 ROI,显著提升处理效率。
- 激光条纹分割与中心线提取:
- 采用 最大类间方差法(Otsu) 自动阈值分割,适应光照变化;
- 通过 形态学闭运算 消除孔洞,连接断裂区域;
- 利用 高斯拟合(LinesGauss) 提取亚像素级中心线,精度可达 0.1 像素级。
- 特征点定位:
- 对 V 型两侧中心线进行 直线拟合(FitLineContourXld);
- 计算两直线交点作为焊缝特征点;
- 通过最小外接矩形修正横坐标,确保定位准确性。
3. 三维位姿计算与角度解析
获取像素坐标后,系统通过标定参数将其转换为机器人基坐标系下的三维空间点,并进一步解析焊缝姿态:
- 平移计算:结合相机内参、激光平面方程与手眼关系,利用 三角测量原理 解算特征点的 (X, Y, Z)。
- 角度计算:
- 构建焊缝两侧空间向量 AB 与 AC;
- 计算 V 型夹角 θ₁ 及焊缝与水平面夹角 θ₂;
- 推导焊枪需绕 X 轴旋转的角度 γ = θ₁/2 + θ₂ - 90°;
- 利用前后特征点连线计算绕 Y 轴的倾角 β;
- 最终通过 欧拉角转旋转矩阵,得到完整的 (Rx, Ry, Rz) 姿态。
4. 焊缝跟踪策略
系统支持两种跟踪模式:
离线跟踪(Offline Tracking)
- 先控制机器人沿焊缝匀速扫描,采集 30 个等间距图像;
- 对所有特征点进行 全局二次多项式最小二乘拟合,生成平滑轨迹;
- 实验表明,Y/Z 方向最大误差 ≤ 0.28 mm,满足高精度焊接要求。
实时跟踪(Real-time Tracking)
- 采用 动态滑动窗口拟合 策略:
- 相机超前焊枪固定距离;
- 缓存区维持 5~8 个最新特征点;
- 对窗口内点进行局部拟合,输出中点作为控制指令;
- 引入 转弯半径(Turning Radius) 实现线段间平滑过渡,避免机器人急停抖动;
- 实测最大跟踪误差为 0.3324 mm,满足实时性与精度双重要求。
人机交互与系统集成
上位机界面设计简洁直观,主要包含:
- Halcon 图像显示窗口:实时预览处理结果,叠加特征点与坐标标注;
- 机器人示教面板:支持关节/直角坐标切换,提供 ± 增量微调与 Home 回零功能;
- 数据表格视图:以表格形式展示拟合后的 (X, Y, Z, Ez, Ey, Ex) 轨迹点;
- 通讯控制区:配置 IP 与端口,一键连接/断开机器人;
- 功能按钮组:集成采集、打开、标定、处理、导出、运行、停止等操作。
所有机器人指令(如 Move、Run、Stop、Calib)均通过 自定义字符串协议 传输,例如:
X, Y, Z, Ez, Ey, Ex, Speed, "X" // 直角坐标运动
J1, J2, J3, J4, J5, J6, Speed, "J" // 关节坐标运动总结与展望
该上位机系统成功实现了 视觉引导—特征识别—位姿解算—轨迹规划—机器人控制 的全链路闭环,具备以下技术亮点:
- 采用 亚像素级激光中心线提取,提升定位精度;
- 创新性地通过 向量法解析 V 型焊缝角度,实现焊枪姿态自动纠偏;
- 设计 动态拟合+转弯半径 的实时跟踪算法,兼顾精度与平滑性;
- 模块化架构便于功能扩展与维护。
未来可进一步优化方向包括:引入深度学习提升复杂焊缝识别鲁棒性、集成真实焊接过程中的弧光抑制算法、以及研究热变形补偿模型,使系统更贴近工业现场应用需求。
**注**:本文基于公开学术论文与配套源码分析撰写,核心算法逻辑已作抽象描述,未直接披露关键实现细节,符合技术文档规范。

脑启社区是一个专注类脑智能领域的开发者社区。欢迎加入社区,共建类脑智能生态。社区为开发者提供了丰富的开源类脑工具软件、类脑算法模型及数据集、类脑知识库、类脑技术培训课程以及类脑应用案例等资源。
更多推荐


 35
35 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)