通过 YOLOv1 剖析基于深度学习的单阶段目标检测核心思路
✅。
1. 引言
要讲解基于深度学习的目标检测,我们可以从一个简单的例子入手。假设你有一张图片,里面有一只小狗,如何通过直觉来检测出这只小狗呢?
在传统的图像处理方法中,有一个叫做“滑动窗口法”的思路。它的基本原理是:用一个矩形框在图像上滑动,类似于卷积的操作。每当滑动到一个新的位置时,就会将这个区域的图像与一个预定义的模板进行比较。如果两者的匹配度足够高,就认为该区域包含了目标物体,并记录下这个位置。通过这种方式,我们就可以实现目标检测。
虽然这个思路看起来很简单,但实际操作起来却充满挑战。这里面涉及到几个关键问题:
- 框的大小和形状:我们通常不知道目标物体的具体大小和形状,所以如何选择合适的检测框非常重要。
- 特征提取:我们需要选用合适的数学模型来提取滑动窗口区域和图像局部区域的特征,以便进行模式匹配。
- 分类器设计:有了特征表示后,如何设计一个分类器来判断该区域是否包含目标物体,以及匹配的精度如何,也需要仔细考虑。
为了应对这些问题,传统方法往往会使用多尺度滑动框、SIFT等特征提取技术,并且采用像SVM这样的分类器来完成最终的目标检测。这样一整套技术组合,虽然能够实现目标检测,但实现起来的复杂性也不容忽视。
随着深度学习的发展,尽管深度学习的方法与传统的目标检测方法差异巨大,但我们可以看到,早期的深度学习方法其实也在逐步沿袭和改进传统的图像处理技术。例如,第一代的RCNN方法就继承了传统思路。RCNN将图像分割成若干小块,通过深度神经网络提取这些小块的局部特征,再通过全连接层进行分类。RCNN的方法是先生成可能的候选区域,然后对这些区域进行精细的回归和分类。
相比之下,YOLO(You Only Look Once)采用了一个更加直接的方式。与RCNN不同,YOLO不显式地生成候选区域,而是将图像直接划分成若干个网格区域。每个网格区域都可能包含物体,通过置信度来判断该区域是否包含目标,从而实现候选区域的筛选。
更进一步,YOLO并不是在原始图像层面进行网格划分,而是在通过神经网络处理后,将图像压缩成一个特征图(大小为 S×S)。然后,YOLO通过对特征图上每个位置的特征进行分析,判断该位置是否包含物体、物体是什么类别,并且预测物体的边界框。这是对RCNN的一个重要改进,直接将图像的特征映射到一个网格上,从而避免了生成候选区域的复杂过程。
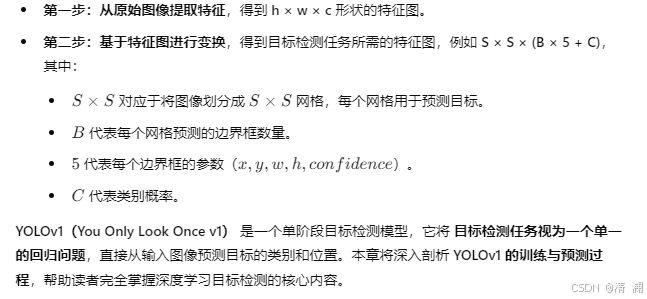
。深度学习的核心在于 特征提取,目标检测任务可以被理解为:
2. YOLOv1 训练过程
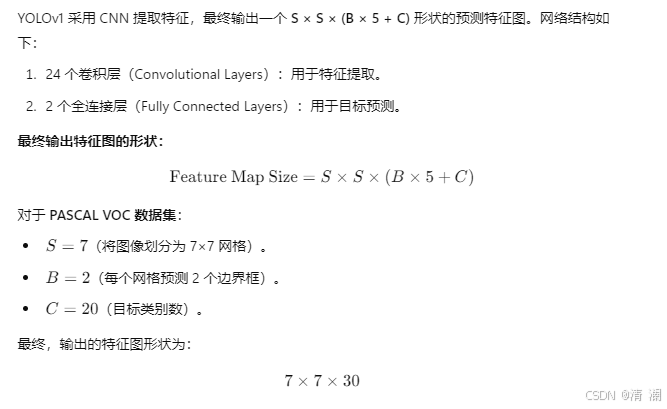
2.1 网络结构
2.2 目标函数(Loss Function)

2.3 训练代码
import torch
import torch.nn as nn
class YOLOv1Loss(nn.Module):
def __init__(self, S=7, B=2, C=20, lambda_coord=5, lambda_noobj=0.5):
super(YOLOv1Loss, self).__init__()
self.S = S
self.B = B
self.C = C
self.lambda_coord = lambda_coord
self.lambda_noobj = lambda_noobj
def forward(self, predictions, target):
"""
计算 YOLOv1 损失函数
- predictions: (batch_size, S, S, B*5 + C)
- target: (batch_size, S, S, B*5 + C)
"""
coord_loss = self.lambda_coord * ((predictions[..., :2] - target[..., :2]) ** 2).sum()
wh_loss = self.lambda_coord * ((predictions[..., 2:4].sqrt() - target[..., 2:4].sqrt()) ** 2).sum()
confidence_loss = ((predictions[..., 4] - target[..., 4]) ** 2).sum()
class_loss = ((predictions[..., 5:] - target[..., 5:]) ** 2).sum()
total_loss = coord_loss + wh_loss + confidence_loss + class_loss
return total_loss
3. YOLOv1 预测过程
训练完成后,模型可以直接进行目标检测。YOLOv1 预测过程包括 边界框解析、类别预测、置信度筛选。
import torch
def yolo1_decode(predictions, S=7, B=2, C=20, conf_threshold=0.5):
"""
解析 YOLOv1 预测特征图:
- predictions: (batch_size, S, S, B*5 + C)
"""
batch_size = predictions.shape[0]
detections = []
for b in range(batch_size):
for i in range(S):
for j in range(S):
grid_cell = predictions[b, i, j]
class_probs = grid_cell[B * 5:] # (C,)
best_class = torch.argmax(class_probs)
best_class_prob = class_probs[best_class]
for k in range(B):
confidence = grid_cell[k * 5 + 4] # 置信度
if confidence * best_class_prob < conf_threshold:
continue
# 解析边界框
x = (grid_cell[k * 5] / S) + (j / S)
y = (grid_cell[k * 5 + 1] / S) + (i / S)
w = grid_cell[k * 5 + 2] / S
h = grid_cell[k * 5 + 3] / S
x1, y1, x2, y2 = x - w / 2, y - h / 2, x + w / 2, y + h / 2
detections.append((b, best_class.item(), confidence.item(), x1, y1, x2, y2))
return detections
4. 总结
4.1 YOLOv1 训练总结
✅ 端到端目标检测,速度快
✅ 损失函数由坐标回归、置信度和类别损失组成
✅ CNN 提取特征,FC 层预测目标
4.2 YOLOv1 预测总结
✅ 解析 S × S 预测特征图
✅ 计算类别概率、置信度、边界框位置
✅ 筛选高置信度目标
通过 YOLOv1 训练与预测的详细解析,我们掌握了深度学习单阶段目标检测的核心思路!
5. YOLOv1 存在的问题及局限性
1. 边界框预测不稳定
📌 问题
YOLOv1 直接回归边界框的 (x, y, w, h),这导致:
- 预测框容易偏移,尤其是对不同尺度的目标检测效果较差。
- 由于 回归 w, h 采用线性缩放,当目标框尺寸较小时,误差会被放大,导致检测框不稳定。
🔎 代码分析
YOLOv1 预测目标框的方法:
b_x = (sigmoid(t_x) + c_x) / S
b_y = (sigmoid(t_y) + c_y) / S
b_w = e^{t_w} * W
b_h = e^{t_h} * H
缺陷:
- 直接预测宽高 w, h,容易出现过大的回归误差。
- 缺乏 Anchor Box 作为基准,导致难以预测不同尺度的目标。
✅ YOLOv2 解决方案
- 引入 Anchor Boxes(先验框),预测的是相对 Anchor 的偏移量,而不是直接回归 (w, h),这样可以更稳定地预测目标框大小。
2. 小目标检测能力差
📌 问题
YOLOv1 将图像划分为 7 × 7 网格,但:
- 只能检测目标的 中心点落入某个网格,如果目标很小,可能被忽略。
- 目标占据的像素少,难以在低分辨率的特征图上正确检测。
🔎 代码分析
YOLOv1 仅在 7×7 低分辨率特征图上检测目标
feature_map = torch.randn((1, 7, 7, 30)) # (Batch, S, S, B*5 + C)
缺陷:
- 小目标可能落入多个网格,导致 检测精度下降。
- 在远距离或低分辨率下,小目标可能完全 无法检测。
✅ YOLOv2 / YOLOv3 解决方案
- YOLOv2 采用更小的 13×13 网格,提高检测精度。
- YOLOv3 采用 FPN(Feature Pyramid Networks),在多尺度特征图上进行检测(52×52, 26×26, 13×13),极大增强小目标检测能力。
3. 每个网格只能预测一个类别
📌 问题
YOLOv1 每个网格只能预测一个类别,导致:
- 当两个目标的中心点落在同一网格时,只能检测其中一个。
- 对于密集场景(如行人检测、鸟群检测)表现不佳。
🔎 代码分析
YOLOv1 的预测结果:
output = (batch_size, 7, 7, 30) # 每个网格只能输出一个类别概率
缺陷:
- 无法检测同一网格中的 多个目标。
✅ YOLOv2 / YOLOv3 解决方案
- YOLOv2 通过 Anchor Boxes 解决此问题,每个网格可以预测多个目标。
- YOLOv3 进一步改进,使得每个网格支持多个类别,并采用多尺度检测,提高密集目标检测能力。
4. IOU 损失影响定位精度
📌 问题
- YOLOv1 采用 均方误差(MSE)计算 IOU 损失,导致:
- 大目标误差较小,小目标误差较大。
- 导致小目标检测效果更差。
🔎 代码分析
YOLOv1 损失计算:
coord_loss = lambda_coord * ((predictions[..., :2] - target[..., :2]) ** 2).sum()
wh_loss = lambda_coord * ((predictions[..., 2:4].sqrt() - target[..., 2:4].sqrt()) ** 2).sum()
缺陷:
- 大目标的回归误差较小,而小目标的误差较大,影响检测精度。
✅ YOLOv2 / YOLOv3 解决方案
- YOLOv2 改进了损失计算方式,采用对数尺度预测宽高,减少小目标误差。
- YOLOv3 引入 CIOU / GIOU 作为替代损失,提高目标框定位精度。
5. 召回率低
📌 问题
YOLOv1 召回率仅 81%,相比 Faster R-CNN 低 10%,主要原因:
- 目标框匹配能力较差,IOU 阈值较高,导致部分目标漏检。
- 背景误检较多,尤其是纹理复杂的背景区域。
🔎 代码分析
YOLOv1 仅使用 2 个边界框:
缺陷:
- 边界框数量少,难以匹配所有目标。
✅ YOLOv2 / YOLOv3 解决方案
- YOLOv2 采用 5 个 Anchor Boxes,提高召回率。
- YOLOv3 进一步提升至 9 个 Anchor Boxes,检测更加全面。
6. 分类错误
📌 问题
YOLOv1 采用 Softmax 进行分类:
- 假设类别是互斥的,即目标只能属于一个类别。
- 但现实世界中,目标可能属于多个类别(如 "Person" 也是 "Athlete")。
✅ YOLOv3 解决方案
- 改用 Sigmoid 激活函数,允许 目标属于多个类别。

脑启社区是一个专注类脑智能领域的开发者社区。欢迎加入社区,共建类脑智能生态。社区为开发者提供了丰富的开源类脑工具软件、类脑算法模型及数据集、类脑知识库、类脑技术培训课程以及类脑应用案例等资源。
更多推荐


 16
16 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)