人工智能: 向量从数学基础到项目实战!!
向量是同时具有大小(magnitude)和方向(direction)的量。a⃗\vec{a}a或加粗字母a\mathbf{a}a。方法要点将向量分解为x和y分量分别计算各方向的合力用毕达哥拉斯定理计算最终大小物理意义合力F⃗合\vec{F}_{\text{合}}F合表示物体受到的净力合力的方向为45(4, 5)45,与x轴的夹角为arctan54arctan45合力大小约为6.40 N注意事
1. 标量
标量是最简单的数学对象,它只有大小,没有方向。在数学和物理中,标量用一个单独的数字来表示,比如:
- 温度: 20°C20°C20°C
- 质量: 5 kg5\text{ kg}5 kg
- 时间: ttt 秒

标量的运算
标量的基本运算非常直观:
-
加减法:直接将数值相加或相减
a+b=ca + b = ca+b=c
例如:3+5=83 + 5 = 83+5=8 -
乘法:两个标量相乘得到一个新的标量
a×b=ca × b = ca×b=c
例如:4×2=84 × 2 = 84×2=8 -
除法:一个标量除以另一个非零标量
ab=c,b≠0\frac{a}{b} = c, \quad b \neq 0ba=c,b=0
例如:102=5\frac{10}{2} = 5210=5
标量在物理中的应用
许多物理量都是标量,它们满足以下标量场方程:
∇2ϕ=∂2ϕ∂x2+∂2ϕ∂y2+∂2ϕ∂z2\nabla^2\phi = \frac{\partial^2\phi}{\partial x^2} + \frac{\partial^2\phi}{\partial y^2} + \frac{\partial^2\phi}{\partial z^2}∇2ϕ=∂x2∂2ϕ+∂y2∂2ϕ+∂z2∂2ϕ
其中:
- ϕ\phiϕ 代表标量场
- ∇2\nabla^2∇2 是拉普拉斯算子
常见的物理标量包括:
- 温度场: T(x,y,z)T(x,y,z)T(x,y,z)
- 压力场: P(x,y,z)P(x,y,z)P(x,y,z)
- 势能场: V(x,y,z)V(x,y,z)V(x,y,z)
这些标量场在空间中的每一点都有一个确定的数值,但没有方向性。
标量的概念虽然简单,但它是更复杂数学概念的基础。在向量、张量等高阶数学对象的研究中,我们常常需要回到标量的基本性质。
2. 向量
向量(Vector)的定义
向量是同时具有大小(magnitude)和方向(direction)的量。我们通常用带箭头的符号表示向量:a⃗\vec{a}a 或加粗字母 a\mathbf{a}a。
向量的表示方法
-
几何表示:用带箭头的线段表示,箭头指向为向量方向,线段长度表示向量大小。
-
代数表示:
- 二维向量:a⃗=(ax,ay)\vec{a} = (a_x, a_y)a=(ax,ay) 或 a⃗=axi+ayj\vec{a} = a_x\mathbf{i} + a_y\mathbf{j}a=axi+ayj
- 三维向量:a⃗=(ax,ay,az)\vec{a} = (a_x, a_y, a_z)a=(ax,ay,az) 或 a⃗=axi+ayj+azk\vec{a} = a_x\mathbf{i} + a_y\mathbf{j} + a_z\mathbf{k}a=axi+ayj+azk
向量的基本运算
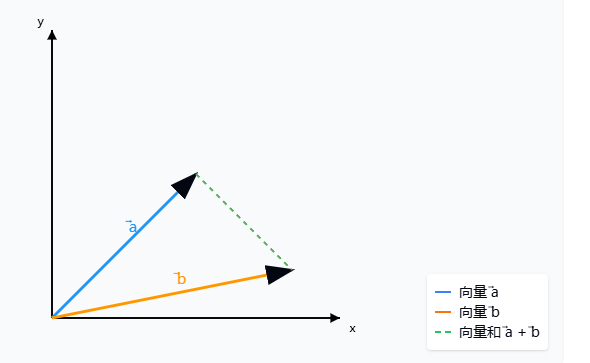
1. 向量加法
向量加法遵循平行四边形法则或三角形法则:
c⃗=a⃗+b⃗\vec{c} = \vec{a} + \vec{b}c=a+b
在分量形式中:
(cx,cy)=(ax+bx,ay+by)(c_x, c_y) = (a_x + b_x, a_y + b_y)(cx,cy)=(ax+bx,ay+by)
2. 向量数乘
标量k与向量相乘:
ka⃗=(kax,kay)k\vec{a} = (ka_x, ka_y)ka=(kax,kay)
3. 向量的点积
两个向量的点积是一个标量:
a⃗⋅b⃗=∣a⃗∣∣b⃗∣cosθ=axbx+ayby\vec{a} \cdot \vec{b} = |\vec{a}||\vec{b}|\cos\theta = a_xb_x + a_yb_ya⋅b=∣a∣∣b∣cosθ=axbx+ayby
4. 向量的叉积
三维向量的叉积得到一个新的向量:
a⃗×b⃗=(aybz−azby,azbx−axbz,axby−aybx)\vec{a} \times \vec{b} = (a_yb_z - a_zb_y, a_zb_x - a_xb_z, a_xb_y - a_yb_x)a×b=(aybz−azby,azbx−axbz,axby−aybx)
大小为:
∣a⃗×b⃗∣=∣a⃗∣∣b⃗∣sinθ|\vec{a} \times \vec{b}| = |\vec{a}||\vec{b}|\sin\theta∣a×b∣=∣a∣∣b∣sinθ
向量的重要性质
-
模长:向量的大小
∣a⃗∣=ax2+ay2|\vec{a}| = \sqrt{a_x^2 + a_y^2}∣a∣=ax2+ay2 -
单位向量:模长为1的向量
a^=a⃗∣a⃗∣\hat{a} = \frac{\vec{a}}{|\vec{a}|}a^=∣a∣a -
正交性:两个向量垂直时,其点积为零
a⃗⊥b⃗ ⟺ a⃗⋅b⃗=0\vec{a} \perp \vec{b} \iff \vec{a} \cdot \vec{b} = 0a⊥b⟺a⋅b=0
3. a⃗=(ax,ay)\vec{a} = (a_x, a_y)a=(ax,ay) 或 a⃗=axi+ayj\vec{a} = a_x\mathbf{i} + a_y\mathbf{j}a=axi+ayj 这两种表示方式有什么联系和区别
基本表示形式
- 有序对表示: a⃗=(ax,ay)\vec{a} = (a_x, a_y)a=(ax,ay)
- 基向量表示: a⃗=axi+ayj\vec{a} = a_x\mathbf{i} + a_y\mathbf{j}a=axi+ayj
让我用可视化来说明这两种表示方式:
联系
-
等价性:
- 这两种表示方法本质上是等价的,描述的是同一个向量
- 都表达了向量在x方向和y方向上的分量大小
-
转换关系:
- (ax,ay)(a_x, a_y)(ax,ay) 中的 axa_xax 就是 axia_x\mathbf{i}axi 中的系数
- (ax,ay)(a_x, a_y)(ax,ay) 中的 aya_yay 就是 ayja_y\mathbf{j}ayj 中的系数
-
几何意义:
- 都可以用来确定向量在平面上的位置
- 都支持向量的各种运算(加减法、数乘等)
区别
-
表示思路:
- (ax,ay)(a_x, a_y)(ax,ay) 直接给出向量在坐标轴上的投影值
- axi+ayja_x\mathbf{i} + a_y\mathbf{j}axi+ayj 强调向量是基向量的线性组合
-
基向量的显式性:
- 有序对表示隐含了标准基向量
- 基向量表示明确展示了基向量 i\mathbf{i}i 和 j\mathbf{j}j
-
适用场景:
- 有序对表示:
- 计算机编程中更常用
- 坐标运算更直观
- 基向量表示:
- 理论分析中更常用
- 在研究不同坐标系统时更有优势
- 有序对表示:
-
推广性:
- 基向量表示更容易推广到一般的向量空间
- 可以用来表示非正交基的情况:a⃗=a1e1+a2e2\vec{a} = a_1\mathbf{e_1} + a_2\mathbf{e_2}a=a1e1+a2e2
数学运算示例
两种表示方法在运算中的等价性:
-
向量加法:
- 有序对:(ax,ay)+(bx,by)=(ax+bx,ay+by)(a_x, a_y) + (b_x, b_y) = (a_x + b_x, a_y + b_y)(ax,ay)+(bx,by)=(ax+bx,ay+by)
- 基向量:(axi+ayj)+(bxi+byj)=(ax+bx)i+(ay+by)j(a_x\mathbf{i} + a_y\mathbf{j}) + (b_x\mathbf{i} + b_y\mathbf{j}) = (a_x + b_x)\mathbf{i} + (a_y + b_y)\mathbf{j}(axi+ayj)+(bxi+byj)=(ax+bx)i+(ay+by)j
-
数乘:
- 有序对:k(ax,ay)=(kax,kay)k(a_x, a_y) = (ka_x, ka_y)k(ax,ay)=(kax,kay)
- 基向量:k(axi+ayj)=(kax)i+(kay)jk(a_x\mathbf{i} + a_y\mathbf{j}) = (ka_x)\mathbf{i} + (ka_y)\mathbf{j}k(axi+ayj)=(kax)i+(kay)j
这两种表示方法各有优势,在不同场合下可以灵活选择使用。理解它们的联系和区别,有助于更深入地理解向量的本质。
4. 向量综合例题
例题背景
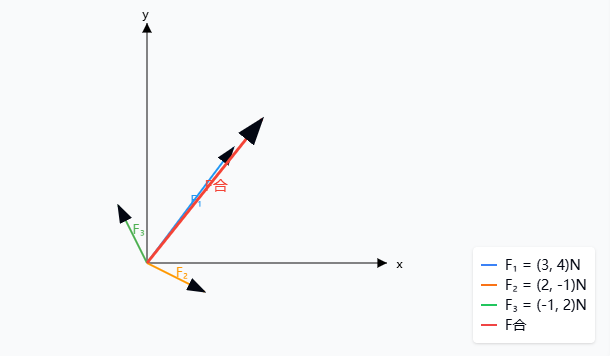
在物理学中,我们经常需要分析多个力的合力。假设一个物体受到三个力的作用:
- 力 F1⃗=(3,4)\vec{F_1} = (3, 4)F1=(3,4) N
- 力 F2⃗=(2,−1)\vec{F_2} = (2, -1)F2=(2,−1) N
- 力 F3⃗=(−1,2)\vec{F_3} = (-1, 2)F3=(−1,2) N
求这三个力的合力和合力的大小。
让我用可视化来展示这个问题:
相关公式
-
向量加法公式:
F⃗合=F1⃗+F2⃗+F3⃗\vec{F}_{\text{合}} = \vec{F_1} + \vec{F_2} + \vec{F_3}F合=F1+F2+F3分量形式:
(Fx,Fy)=(F1x+F2x+F3x,F1y+F2y+F3y)(F_x, F_y) = (F_{1x} + F_{2x} + F_{3x}, F_{1y} + F_{2y} + F_{3y})(Fx,Fy)=(F1x+F2x+F3x,F1y+F2y+F3y) -
向量模长公式:
∣F⃗合∣=Fx2+Fy2|\vec{F}_{\text{合}}| = \sqrt{F_x^2 + F_y^2}∣F合∣=Fx2+Fy2
计算步骤
步骤1:分量相加
计算x方向分量之和:
Fx=F1x+F2x+F3x=3+2+(−1)=4 NF_x = F_{1x} + F_{2x} + F_{3x} = 3 + 2 + (-1) = 4\text{ N}Fx=F1x+F2x+F3x=3+2+(−1)=4 N
计算y方向分量之和:
Fy=F1y+F2y+F3y=4+(−1)+2=5 NF_y = F_{1y} + F_{2y} + F_{3y} = 4 + (-1) + 2 = 5\text{ N}Fy=F1y+F2y+F3y=4+(−1)+2=5 N
步骤2:得到合力向量
合力向量为:
F⃗合=(4,5) N\vec{F}_{\text{合}} = (4, 5)\text{ N}F合=(4,5) N
或
F⃗合=4i+5j N\vec{F}_{\text{合}} = 4\mathbf{i} + 5\mathbf{j}\text{ N}F合=4i+5j N
步骤3:计算合力大小
使用向量模长公式:
∣F⃗合∣=42+52=16+25=41≈6.40 N|\vec{F}_{\text{合}}| = \sqrt{4^2 + 5^2} = \sqrt{16 + 25} = \sqrt{41} \approx 6.40\text{ N}∣F合∣=42+52=16+25=41≈6.40 N
总结与分析
-
方法要点:
- 将向量分解为x和y分量
- 分别计算各方向的合力
- 用毕达哥拉斯定理计算最终大小
-
物理意义:
- 合力 F⃗合\vec{F}_{\text{合}}F合 表示物体受到的净力
- 合力的方向为 (4,5)(4, 5)(4,5),与x轴的夹角为 arctan(54)\arctan(\frac{5}{4})arctan(45)
- 合力大小约为6.40 N
-
注意事项:
- 计算时需要注意正负号
- 合力的方向和大小都很重要
- 单位要保持一致
这个例题展示了向量运算在物理问题中的实际应用,特别是在力的分析中的重要性。通过分解向量和向量加法,我们可以得到复杂力系统的合力。
5. 向量综合案例2
案例背景
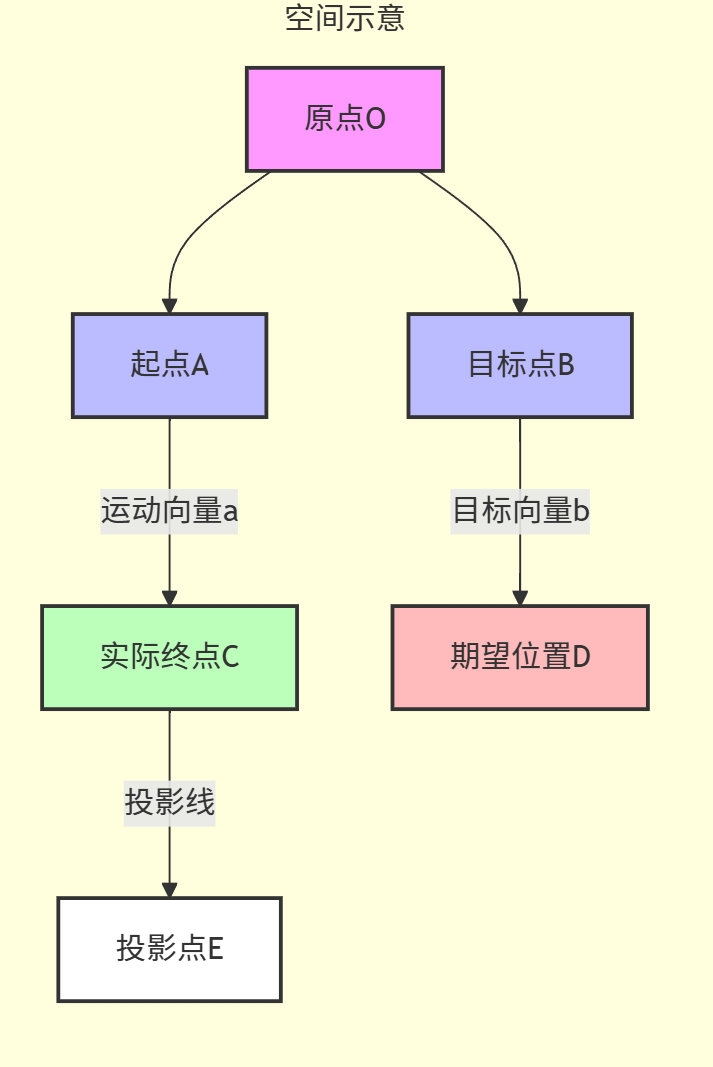
在机器人控制中,一个机械臂需要将物体从A点移动到B点。已知:
- 机械臂的运动向量 a⃗=(3,4,0)\vec{a} = (3, 4, 0)a=(3,4,0) 米
- 目标方向向量 b⃗=(6,0,8)\vec{b} = (6, 0, 8)b=(6,0,8) 米
需要计算:
- 机械臂运动方向与目标方向的夹角
- 机械臂运动在目标方向上的投影距离
- 判断运动效率(投影与期望距离的比值)
相关公式
-
向量点积公式:
a⃗⋅b⃗=∣a∣∣b∣cosθ=axbx+ayby+azbz\vec{a} \cdot \vec{b} = |a||b|\cos\theta = a_xb_x + a_yb_y + a_zb_za⋅b=∣a∣∣b∣cosθ=axbx+ayby+azbz -
向量模长公式:
∣a⃗∣=ax2+ay2+az2|\vec{a}| = \sqrt{a_x^2 + a_y^2 + a_z^2}∣a∣=ax2+ay2+az2 -
向量夹角公式:
cosθ=a⃗⋅b⃗∣a⃗∣∣b⃗∣\cos\theta = \frac{\vec{a} \cdot \vec{b}}{|\vec{a}||\vec{b}|}cosθ=∣a∣∣b∣a⋅b -
向量投影公式:
projb⃗a⃗=a⃗⋅b⃗∣b⃗∣2b⃗proj_{\vec{b}}\vec{a} = \frac{\vec{a} \cdot \vec{b}}{|\vec{b}|^2}\vec{b}projba=∣b∣2a⋅bb
投影长度:
∣projb⃗a⃗∣=∣a⃗⋅b⃗∣∣b⃗∣|proj_{\vec{b}}\vec{a}| = \frac{|\vec{a} \cdot \vec{b}|}{|\vec{b}|}∣projba∣=∣b∣∣a⋅b∣
计算步骤
步骤1:计算向量点积
a⃗⋅b⃗=(3⋅6)+(4⋅0)+(0⋅8)=18+0+0=18\begin{align*} \vec{a} \cdot \vec{b} &= (3 \cdot 6) + (4 \cdot 0) + (0 \cdot 8) \\ &= 18 + 0 + 0 = 18 \end{align*}a⋅b=(3⋅6)+(4⋅0)+(0⋅8)=18+0+0=18
步骤2:计算向量模长
∣a⃗∣=32+42+02=25=5∣b⃗∣=62+02+82=100=10\begin{align*} |\vec{a}| &= \sqrt{3^2 + 4^2 + 0^2} = \sqrt{25} = 5 \\ |\vec{b}| &= \sqrt{6^2 + 0^2 + 8^2} = \sqrt{100} = 10 \end{align*}∣a∣∣b∣=32+42+02=25=5=62+02+82=100=10
步骤3:计算夹角
cosθ=a⃗⋅b⃗∣a⃗∣∣b⃗∣=185⋅10=1850=0.36θ=arccos(0.36)≈68.9°\begin{align*} \cos\theta &= \frac{\vec{a} \cdot \vec{b}}{|\vec{a}||\vec{b}|} = \frac{18}{5 \cdot 10} = \frac{18}{50} = 0.36 \\ \theta &= \arccos(0.36) \approx 68.9° \end{align*}cosθθ=∣a∣∣b∣a⋅b=5⋅1018=5018=0.36=arccos(0.36)≈68.9°
步骤4:计算投影长度
∣projb⃗a⃗∣=∣a⃗⋅b⃗∣∣b⃗∣=1810=1.8 米\begin{align*} |proj_{\vec{b}}\vec{a}| &= \frac{|\vec{a} \cdot \vec{b}|}{|\vec{b}|} = \frac{18}{10} = 1.8\text{ 米} \end{align*}∣projba∣=∣b∣∣a⋅b∣=1018=1.8 米
步骤5:计算运动效率
运动效率 = 投影长度/目标向量长度 × 100%
效率=1.810×100%=18%\text{效率} = \frac{1.8}{10} \times 100\% = 18\%效率=101.8×100%=18%
总结与分析
-
几何意义:
- 夹角68.9°表示机械臂运动方向与目标方向偏离较大
- 投影长度1.8米表示在目标方向上的有效位移
- 18%的效率说明大部分运动没有贡献到目标方向
-
优化建议:
- 可以通过调整机械臂运动方向,使其更接近目标方向
- 理想情况下,两向量应该平行(夹角为0°)
- 可以通过最小化夹角来提高运动效率
-
本案例涉及的新知识点:
- 向量的点积运算
- 向量的投影计算
- 三维空间中的向量分析
- 运动效率的评估
- 应用价值:
- 机器人运动控制
- 路径规划优化
- 运动效率评估
- 空间定位系统
这个案例展示了向量在机器人控制和空间分析中的实际应用,特别强调了向量点积、投影等概念的practical应用。与上一个案例相比,这个案例更侧重于:
- 三维空间分析(而非平面)
- 向量点积(而非向量加法)
- 投影计算(而非合成计算)
- 效率评估(而非纯力学分析)
这些不同的侧重点帮助我们更全面地理解向量的应用。
6. 向量综合案例2
案例背景
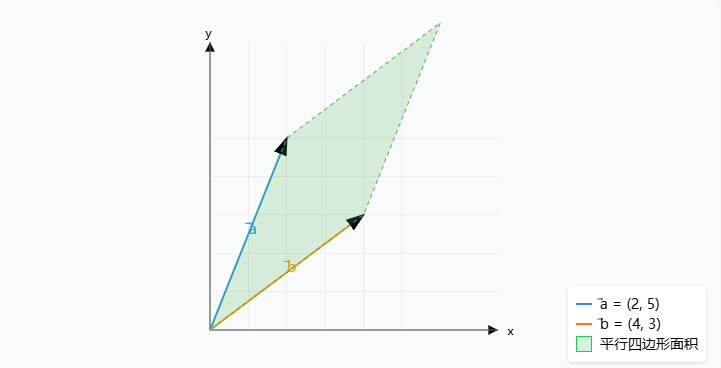
在地理信息系统(GIS)中,需要计算一个不规则地块的面积。已知:
- 从原点出发的两个向量 a⃗=(2,5)\vec{a} = (2, 5)a=(2,5) 和 b⃗=(4,3)\vec{b} = (4, 3)b=(4,3) 确定了地块的两条边
- 需要计算:
- 这两个向量构成的平行四边形面积
- 两向量的单位向量
- 判断两向量是否垂直
相关公式
-
向量叉积的模长公式(二维向量扩展到三维):
∣a⃗×b⃗∣=∣a∣∣b∣sinθ=∣axby−aybx∣|\vec{a} \times \vec{b}| = |a||b|\sin\theta = |a_xb_y - a_yb_x|∣a×b∣=∣a∣∣b∣sinθ=∣axby−aybx∣ -
平行四边形面积公式:
S=∣a⃗×b⃗∣S = |\vec{a} \times \vec{b}|S=∣a×b∣ -
单位向量公式:
a^=a⃗∣a⃗∣=(axax2+ay2,ayax2+ay2)\hat{a} = \frac{\vec{a}}{|\vec{a}|} = (\frac{a_x}{\sqrt{a_x^2 + a_y^2}}, \frac{a_y}{\sqrt{a_x^2 + a_y^2}})a^=∣a∣a=(ax2+ay2ax,ax2+ay2ay) -
向量点积判断垂直:
a⃗⊥b⃗ ⟺ a⃗⋅b⃗=0\vec{a} \perp \vec{b} \iff \vec{a} \cdot \vec{b} = 0a⊥b⟺a⋅b=0
计算步骤
步骤1:计算平行四边形面积
使用叉积的模长:
S=∣axby−aybx∣=∣2⋅3−5⋅4∣=∣6−20∣=14 平方单位\begin{align*} S &= |a_xb_y - a_yb_x| \\ &= |2 \cdot 3 - 5 \cdot 4| \\ &= |6 - 20| \\ &= 14\text{ 平方单位} \end{align*}S=∣axby−aybx∣=∣2⋅3−5⋅4∣=∣6−20∣=14 平方单位
步骤2:计算单位向量
先计算向量模长:
∣a⃗∣=22+52=29∣b⃗∣=42+32=25=5\begin{align*} |\vec{a}| &= \sqrt{2^2 + 5^2} = \sqrt{29} \\ |\vec{b}| &= \sqrt{4^2 + 3^2} = \sqrt{25} = 5 \end{align*}∣a∣∣b∣=22+52=29=42+32=25=5
然后计算单位向量:
a^=(229,529)≈(0.371,0.928)b^=(45,35)=(0.8,0.6)\begin{align*} \hat{a} &= (\frac{2}{\sqrt{29}}, \frac{5}{\sqrt{29}}) \approx (0.371, 0.928) \\ \hat{b} &= (\frac{4}{5}, \frac{3}{5}) = (0.8, 0.6) \end{align*}a^b^=(292,295)≈(0.371,0.928)=(54,53)=(0.8,0.6)
步骤3:判断是否垂直
计算点积:
a⃗⋅b⃗=2⋅4+5⋅3=8+15=23≠0\begin{align*} \vec{a} \cdot \vec{b} &= 2 \cdot 4 + 5 \cdot 3 \\ &= 8 + 15 \\ &= 23 \neq 0 \end{align*}a⋅b=2⋅4+5⋅3=8+15=23=0
所以两向量不垂直。
总结与分析
-
几何意义:
- 叉积的模长代表由两向量构成的平行四边形面积
- 单位向量保持原向量方向,但长度为1
- 点积不为0说明两向量不垂直
-
本案例涉及的新知识点:
- 向量叉积的几何意义
- 单位向量的计算
- 平行四边形面积计算
- 向量垂直性判断
-
与上一个案例的区别:
- 使用叉积(而非点积)
- 计算面积(而非投影)
- 关注单位向量(而非效率)
- 二维平面(而非三维空间)
-
应用价值:
- 地理信息系统中的面积计算
- 向量标准化处理
- 几何形状分析
- 方向性判断
这个案例展示了向量在地理信息系统和几何计算中的应用,特别强调了叉积的几何意义。与前面的案例相比,这个案例更侧重于:
- 面积计算(而非距离和角度)
- 叉积应用(而非点积)
- 平面几何(而非空间几何)
- 单位向量(而非投影)
这种多角度的分析帮助我们更全面地理解向量的各种应用场景。
7. 向量综合案例2
案例背景
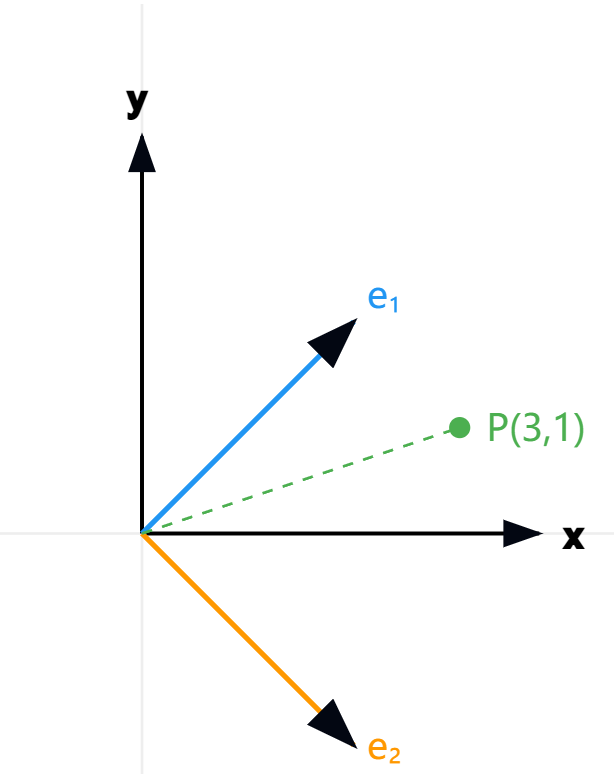
在计算机图形学中,我们需要将一个物体从标准坐标系变换到新的坐标系。已知:
- 新坐标系的基向量:e1⃗=(1,1)\vec{e_1} = (1, 1)e1=(1,1), e2⃗=(1,−1)\vec{e_2} = (1, -1)e2=(1,−1)
- 点P在标准坐标系下的坐标:P=(3,1)P = (3, 1)P=(3,1)
需要:
- 判断新基向量是否线性相关
- 确定点P在新坐标系下的坐标
- 验证结果的正确性
相关公式
-
线性相关判定:
向量 e1⃗\vec{e_1}e1 和 e2⃗\vec{e_2}e2 线性相关,当且仅当存在不全为零的实数 k1k_1k1, k2k_2k2 使得:
k1e1⃗+k2e2⃗=0⃗k_1\vec{e_1} + k_2\vec{e_2} = \vec{0}k1e1+k2e2=0对二维向量,可以通过行列式判断:
det(e1⃗,e2⃗)=∣e1xe2xe1ye2y∣=e1xe2y−e1ye2x≠0\det(\vec{e_1}, \vec{e_2}) = \begin{vmatrix} e_{1x} & e_{2x} \\ e_{1y} & e_{2y} \end{vmatrix} = e_{1x}e_{2y} - e_{1y}e_{2x} \neq 0det(e1,e2)= e1xe1ye2xe2y =e1xe2y−e1ye2x=0 -
坐标变换公式:
如果点P在标准基下的坐标是 (x,y)(x, y)(x,y),新基下的坐标是 (x′,y′)(x', y')(x′,y′),则:
(x,y)=x′e1⃗+y′e2⃗(x, y) = x'\vec{e_1} + y'\vec{e_2}(x,y)=x′e1+y′e2 -
变换矩阵:
(xy)=(e1xe2xe1ye2y)(x′y′)\begin{pmatrix} x \\ y \end{pmatrix} = \begin{pmatrix} e_{1x} & e_{2x} \\ e_{1y} & e_{2y} \end{pmatrix} \begin{pmatrix} x' \\ y' \end{pmatrix}(xy)=(e1xe1ye2xe2y)(x′y′)
计算步骤
步骤1:判断线性相关性
计算行列式:
det(e1⃗,e2⃗)=∣111−1∣=1⋅(−1)−1⋅1=−2≠0\begin{align*} \det(\vec{e_1}, \vec{e_2}) &= \begin{vmatrix} 1 & 1 \\ 1 & -1 \end{vmatrix} \\ &= 1 \cdot (-1) - 1 \cdot 1 \\ &= -2 \neq 0 \end{align*}det(e1,e2)=
111−1
=1⋅(−1)−1⋅1=−2=0
因此这两个基向量线性无关,可以作为新的基。
步骤2:求解变换方程
将P点坐标表示为新基的线性组合:
(3,1)=x′e1⃗+y′e2⃗=x′(1,1)+y′(1,−1)(3, 1) = x'\vec{e_1} + y'\vec{e_2} = x'(1, 1) + y'(1, -1)(3,1)=x′e1+y′e2=x′(1,1)+y′(1,−1)
展开得到方程组:
{x′+y′=3x′−y′=1\begin{cases} x' + y' = 3 \\ x' - y' = 1 \end{cases}{x′+y′=3x′−y′=1
步骤3:解方程组
加减消元:
x′+y′=3x′−y′=12x′=4x′=2y′=1\begin{align*} x' + y' &= 3 \\ x' - y' &= 1 \\ \hline 2x' &= 4 \\ x' &= 2 \\ y' &= 1 \end{align*}x′+y′x′−y′2x′x′y′=3=1=4=2=1
步骤4:验证结果
将得到的坐标代回原方程:
2(1,1)+1(1,−1)=(2,2)+(1,−1)=(3,1)\begin{align*} 2(1, 1) + 1(1, -1) &= (2, 2) + (1, -1) \\ &= (3, 1) \end{align*}2(1,1)+1(1,−1)=(2,2)+(1,−1)=(3,1)
验证正确。
总结与分析
-
几何意义:
- 线性无关的向量可以张成整个平面
- 新坐标表示了点P在新基方向上的分量
- 变换矩阵描述了两个坐标系之间的关系
-
本案例涉及的新知识点:
- 向量线性相关性
- 基变换
- 坐标系转换
- 线性方程组求解
-
与上一个案例的区别:
- 关注基变换(而非几何计算)
- 使用线性代数方法(而非向量运算)
- 涉及坐标系变换(而非单一坐标系)
- 强调线性相关性(而非几何度量)
-
应用价值:
- 计算机图形学中的坐标变换
- 机器人运动规划
- 图像处理
- 数据降维和特征提取
这个案例展示了向量在线性代数和坐标变换中的应用,特别强调了:
- 基向量的线性相关性
- 坐标系变换的数学原理
- 线性方程组的几何意义
- 变换矩阵的应用
这种从线性代数角度的分析,提供了理解向量的另一个重要视角。
8. 人工智能中,向量的综合案例
案例背景
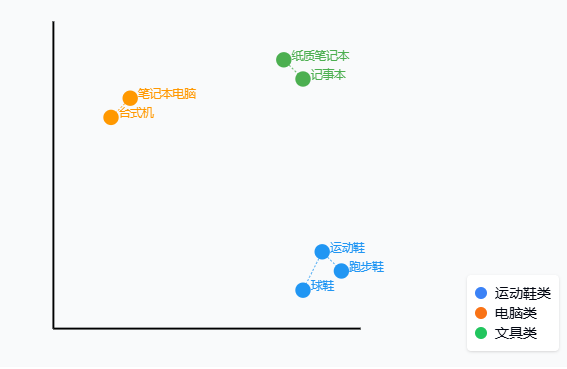
某电商平台需要开发一个智能商品搜索系统,要求能够理解用户搜索词的语义,并返回相关商品。例如:
- 用户搜索"运动鞋"时,也能匹配到"跑步鞋"、"球鞋"等
- 搜索"笔记本"时,能区分"笔记本电脑"和"纸质笔记本"的语义
为什么选用向量
-
语义表示能力:
- 向量能够在高维空间中表示词语的语义特征
- 语义相近的词在向量空间中距离较近
- 可以通过向量运算捕捉词语之间的关系
-
数学优势:
- 可以使用余弦相似度等度量计算语义相似性
- 支持加减运算,可以进行语义组合
- 便于在计算机中存储和处理
-
维度压缩:
- 将高维稀疏的one-hot编码压缩成低维稠密向量
- 典型的词向量维度为50~300维
- 有效降低存储和计算成本
让我们用React组件来可视化词向量的语义空间:
使用向量的思路和技巧
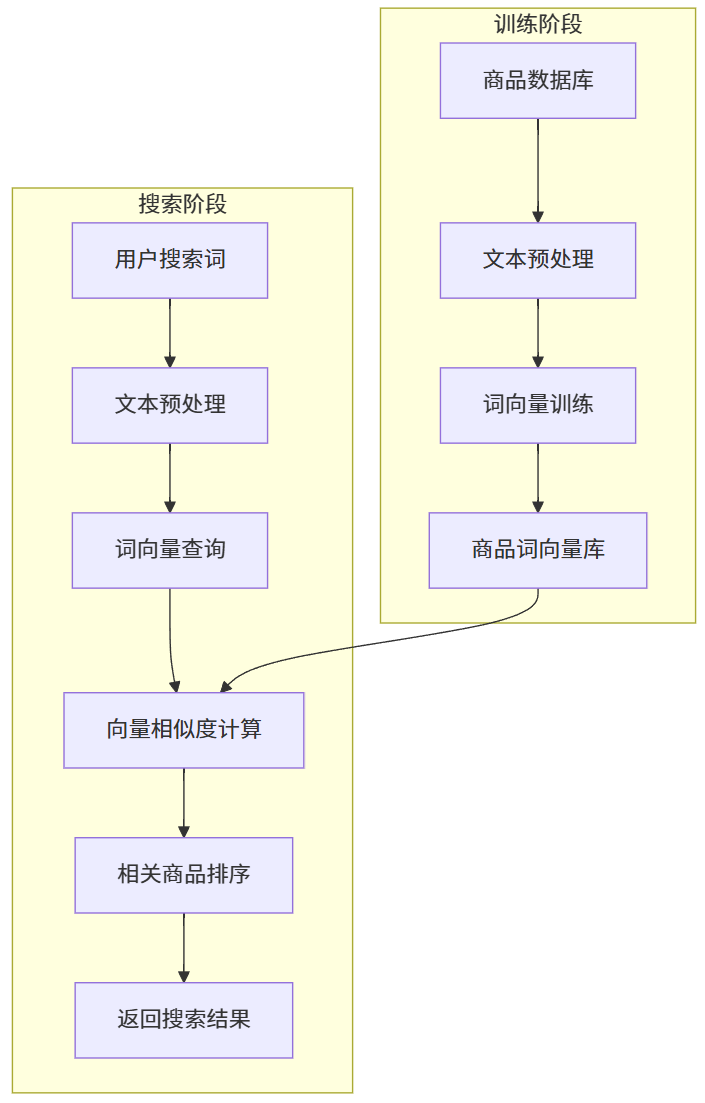
-
预处理阶段:
- 分词:将商品描述切分成词语单元
- 清洗:去除停用词、特殊字符等噪声
- 标准化:统一大小写、同义词替换等
-
向量训练:
- 使用Word2Vec或GloVe等算法训练词向量
- 选择适当的窗口大小和维度
- 使用领域相关的语料进行训练
-
相似度计算:
- 使用余弦相似度衡量语义相近度
- 建立向量索引加速检索
- 设置相似度阈值过滤不相关结果
-
结果优化:
- 考虑商品类别信息
- 结合用户行为数据
- 应用业务规则过滤
完整使用过程
1. 数据准备
# 商品描述示例
products = [
{"id": 1, "name": "Nike跑步鞋", "description": "专业跑步运动鞋..."},
{"id": 2, "name": "ThinkPad笔记本", "description": "商务笔记本电脑..."},
{"id": 3, "name": "纸质记事本", "description": "办公用品笔记本..."}
]
# 分词处理
def preprocess(text):
words = jieba.cut(text)
return [w for w in words if w not in stop_words]
2. 训练词向量
from gensim.models import Word2Vec
# 训练参数
params = {
"size": 100, # 向量维度
"window": 5, # 上下文窗口
"min_count": 1, # 最小词频
"workers": 4 # 训练线程数
}
# 训练模型
model = Word2Vec(sentences, **params)
3. 构建搜索函数
def search_products(query, top_k=5):
# 查询词向量化
query_vector = get_query_vector(query)
# 计算相似度
similarities = []
for product in products:
prod_vector = get_product_vector(product)
sim = cosine_similarity(query_vector, prod_vector)
similarities.append((product, sim))
# 排序返回结果
return sorted(similarities, key=lambda x: x[1], reverse=True)[:top_k]
4. 相似度计算
def cosine_similarity(v1, v2):
"""计算余弦相似度"""
dot_product = np.dot(v1, v2)
norm1 = np.linalg.norm(v1)
norm2 = np.linalg.norm(v2)
return dot_product / (norm1 * norm2)
5. 结果优化
def optimize_results(results):
"""优化搜索结果"""
# 应用类别过滤
results = filter_by_category(results)
# 考虑商品评分
results = sort_by_rating(results)
# 应用业务规则
results = apply_business_rules(results)
return results
效果评估
-
准确性指标:
- 相关性:搜索结果与查询词的语义相关度
- 召回率:相关商品的覆盖程度
- 精确率:返回结果中相关商品的比例
-
性能指标:
- 响应时间:平均查询延迟
- 内存占用:向量索引的存储开销
- QPS:每秒查询处理能力
这个案例展示了向量在自然语言处理和搜索系统中的实际应用。通过将词语映射到向量空间,我们可以:
- 有效捕捉语义关系
- 实现智能搜索匹配
- 提升用户搜索体验
该方法的优势在于它能够处理同义词、近义词等语义变体,使搜索系统更加智能和人性化。

脑启社区是一个专注类脑智能领域的开发者社区。欢迎加入社区,共建类脑智能生态。社区为开发者提供了丰富的开源类脑工具软件、类脑算法模型及数据集、类脑知识库、类脑技术培训课程以及类脑应用案例等资源。
更多推荐



 18
18 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)