Batch Normalization 的原理
BatchNormalization(BN)是一种用于加速深度神经网络训练的技术,通过标准化每一层的输入使其具有零均值和单位方差。其核心步骤包括:计算小批量的均值和方差,进行标准化,并引入可学习的缩放和平移参数以保持模型表达能力。BN能缓解内部协变量偏移,稳定训练过程,允许使用更高学习率,并起到一定正则化作用。训练时使用当前批次的统计量,推理时则采用滑动平均值。BN有效解决了梯度不稳定等问题,提高
目录
Batch Normalization(BN) 是一种加速深度神经网络训练并提高其稳定性的方法,由 Ioffe 和 Szegedy 在 2015 年提出。BN 的核心思想是对每一层的输入进行标准化,使其分布具有零均值和单位方差。
原理:
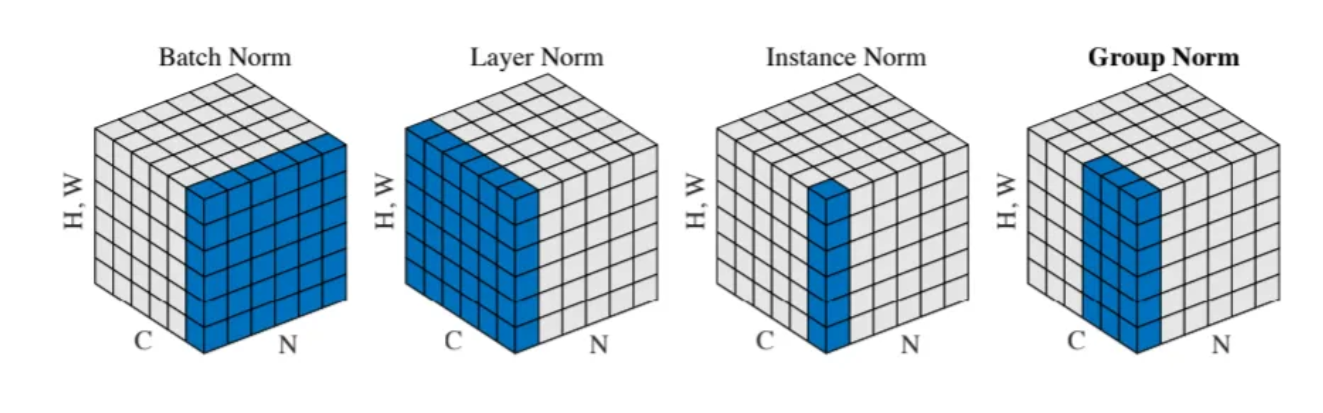
BN 是在每一个小批量(batch)中对激活值(或特征)进行归一化处理,主要包括以下几个步骤:
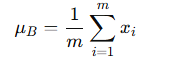
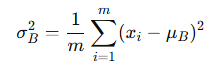
1. 计算小批量的均值和方差
假设输入为一个小批量的激活值 x = [x₁, x₂, ..., xₘ],其中 m 是 batch size,对每个维度进行如下计算:
均值(mean):
方差(variance):
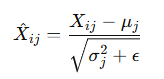
2. 标准化(Normalization)
将数据变为均值为 0、方差为 1:
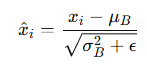
其中 ε 是一个很小的正数,防止除以 0。
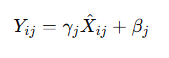
3. 缩放与偏移(可学习参数)
为了保留模型的表达能力,引入两个可学习参数:
-
γ(scale):缩放因子 -
β(shift):平移因子
最终输出:
![]()
4. 为什么要用 Batch Normalization?
主要优点:
-
缓解内部协变量偏移(Internal Covariate Shift):
每一层输入分布更稳定,加快收敛速度。 -
允许使用更高的学习率:
降低了对权重初始化的敏感性。 -
起到一定的正则化作用:
减少对 Dropout 的依赖。 -
训练更深的神经网络:
有助于梯度更稳定地传播。
向量形式表示:
对于输入 X ∈ ℝ^{m×d}(m 是 batch size,d 是每个样本的维度):
计算每个特征维度的均值和方差:

标准化:
仿射变换:
5. 在训练和推理(测试)中的区别
-
训练时:使用当前 batch 的均值和方差。
-
推理时:使用训练过程中累计得到的滑动平均值(moving average)来替代 batch statistics。
6.深入理解BN
BN 的主要目标是:
缓解“内部协变量偏移(Internal Covariate Shift)”,即在训练过程中,每一层的输入分布随着前一层参数更新而发生变化,这使得训练变得困难、收敛变慢。
BN 主要解决了什么?
为了让每一层的输入保持在相对稳定、标准化的分布范围内(均值为0,方差为1),具有以下好处:
-
梯度更稳定,不会因为输入值过大或过小造成梯度爆炸或消失。
-
激活函数工作在非饱和区间(特别是 sigmoid / tanh),从而更有效地传播梯度。
-
提高网络收敛速度,常能使用更大学习率。
-
一定程度上抑制过拟合(类似正则化效果)。
7.pytorch实现BN代码
通过代码加深理解,再次回顾下公式(以 2D 数据为例):

实现代码(简化版)
下面是一个 全连接层/特征维度 BN 的例子(适合全连接层或通道维度,卷积会在每个通道维度做 BN):
import torch
import torch.nn as nn
class YOLOv1Full(nn.Module):
def __init__(self, S=7, B=2, C=20):
super(YOLOv1Full, self).__init__()
self.S = S
self.B = B
self.C = C
# 24 个卷积层
self.features = nn.Sequential(
# (3, 448, 448) -> (64, 224, 224)
nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3),
nn.LeakyReLU(0.1, inplace=True),
nn.MaxPool2d(2, 2),
# (64, 224, 224) -> (192, 112, 112)
nn.Conv2d(64, 192, kernel_size=3, padding=1),
nn.LeakyReLU(0.1, inplace=True),
nn.MaxPool2d(2, 2),
# (192, 112, 112) -> (128, 112, 112)
nn.Conv2d(192, 128, kernel_size=1),
nn.LeakyReLU(0.1, inplace=True),
# (128, 112, 112) -> (256, 112, 112)
nn.Conv2d(128, 256, kernel_size=3, padding=1),
nn.LeakyReLU(0.1, inplace=True),
# (256, 112, 112) -> (256, 112, 112)
nn.Conv2d(256, 256, kernel_size=1),
nn.LeakyReLU(0.1, inplace=True),
# (256, 112, 112) -> (512, 112, 112)
nn.Conv2d(256, 512, kernel_size=3, padding=1),
nn.LeakyReLU(0.1, inplace=True),
nn.MaxPool2d(2, 2), # (512, 112, 112) -> (512, 56, 56)
# 4 次重复的卷积块
*self._make_conv_block(512, 256, 512),
*self._make_conv_block(512, 256, 512),
*self._make_conv_block(512, 256, 512),
*self._make_conv_block(512, 512, 1024),
nn.MaxPool2d(2, 2), # (1024, 56, 56) -> (1024, 28, 28)
# 2 次卷积块
*self._make_conv_block(1024, 512, 1024),
*self._make_conv_block(1024, 512, 1024),
# 两次额外卷积
nn.Conv2d(1024, 1024, kernel_size=3, padding=1),
nn.LeakyReLU(0.1, inplace=True),
nn.Conv2d(1024, 1024, kernel_size=3, stride=2, padding=1),
nn.LeakyReLU(0.1, inplace=True),
# (1024, 14, 14) -> (1024, 14, 14)
nn.Conv2d(1024, 1024, kernel_size=3, padding=1),
nn.LeakyReLU(0.1, inplace=True),
nn.Conv2d(1024, 1024, kernel_size=3, padding=1),
nn.LeakyReLU(0.1, inplace=True),
)
# 全连接层
self.fc = nn.Sequential(
nn.Flatten(),
nn.Linear(1024 * self.S * self.S, 4096),
nn.LeakyReLU(0.1, inplace=True),
nn.Dropout(0.5),
nn.Linear(4096, self.S * self.S * (self.C + self.B * 5))
)
def _make_conv_block(self, in_channels, mid_channels, out_channels):
"""
YOLOv1 中典型的 1x1 + 3x3 卷积块
"""
return [
nn.Conv2d(in_channels, mid_channels, kernel_size=1),
nn.LeakyReLU(0.1, inplace=True),
nn.Conv2d(mid_channels, out_channels, kernel_size=3, padding=1),
nn.LeakyReLU(0.1, inplace=True),
]
def forward(self, x):
x = self.features(x)
x = self.fc(x)
return x.view(-1, self.S, self.S, self.C + self.B * 5)
if __name__ == '__main__':
model = YOLOv1Full()
dummy_input = torch.randn(1, 3, 448, 448)
output = model(dummy_input)
print("Output shape:", output.shape) # (1, 7, 7, 30)
使用示例:
# 随机数据
np.random.seed(0)
x = np.random.randn(4, 5) # batch_size=4, feature_dim=5
# 初始化 BN
bn = BatchNorm(dim=5)
# 前向
out = bn.forward(x, is_training=True)
print("输出:", out)
# 假设梯度
dout = np.random.randn(4, 5)
# 反向
dx, d_gamma, d_beta = bn.backward(dout)
print("dx:", dx)
print("d_gamma:", d_gamma)
print("d_beta:", d_beta)
- 这个代码是“全连接层”下的 BN 结构(适合
(batch, features)数据)。 - 卷积中的 BN(2D)同理,只是把
(N, C, H, W)中的均值/方差按 (N, H, W) 平均(axis=(0,2,3))。 - 反向传播部分比较复杂,核心是链式法则展开(尤其是对标准化公式的导数)。

脑启社区是一个专注类脑智能领域的开发者社区。欢迎加入社区,共建类脑智能生态。社区为开发者提供了丰富的开源类脑工具软件、类脑算法模型及数据集、类脑知识库、类脑技术培训课程以及类脑应用案例等资源。
更多推荐

 19
19 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)