Nature子刊发表 | 通风管道也能飞无人机!
在持续探索无人机极限空间飞行的研究过程中,法国洛林大学与Inria联合团队近期发布了其阶段性成果。2025年6月,他们在Nature子刊《npj Robotics》发表论文Flying in Air Ducts,提出一套融合气动力感知与神经网络定位的轻型飞行系统,成功实现一架18厘米微型四旋翼在直径仅35厘米的通风管中自主飞行。该系统集成了风管内气动建模、ToF-IMU融合感知与神经网络定位,突破
在持续探索无人机极限空间飞行的研究过程中,法国洛林大学与Inria联合团队近期发布了其阶段性成果。2025年6月,他们在Nature子刊《npj Robotics》发表论文Flying in Air Ducts,提出一套融合气动力感知与神经网络定位的轻型飞行系统,成功实现一架18厘米微型四旋翼在直径仅35厘米的通风管中自主飞行。该系统集成了风管内气动建模、ToF-IMU融合感知与神经网络定位,突破了微型无人机在狭窄空间中自主悬停与导航的关键瓶颈。
01研究背景
通风管道作为现代建筑(如商办楼宇、医院、轨道交通、工业厂房)中的关键结构,其内部状态直接影响空调、供暖系统运行与空气质量,需要定期检查。然而,这些封闭、狭小、复杂的风管系统对传统检测方式构成极大挑战:
-
人工作业不可进入;
-
地面机器人难以攀爬/越障;
-
飞行器则面临严重气动干扰与感知障碍。
尽管已有一些轮式与带壳飞行机器人应用于管道环境,但它们多用于较大空间或依赖人工遥控,很难实现在小直径圆形风管中的稳定自主飞行。
技术难点
-
气动扰动复杂 风管内部回流强烈,叠加地面效应、吸顶效应与吸墙效应,使无人机悬停高度敏感、姿态易失稳。
-
感知条件极端 风管环境封闭、黑暗、无特征,视觉类定位算法难以工作,传统ToF+IMU方法精度不足。
-
算力资源有限 嵌入式平台算力受限,难以实时运行高复杂度算法,需实现低延迟、高鲁棒、可部署的定位与控制方案。
02研究方法
该研究围绕微型无人机在狭窄通风管中的自主稳定飞行,提出了一套融合气动力建模与端到端位置估计的轻型飞控系统,实现了在直径仅35厘米风管中的悬停与自主飞行。
图片来源:《Flying in air ducts》,Thomas Martin 等,npj Robotics 2025
通风管内气动力场建模
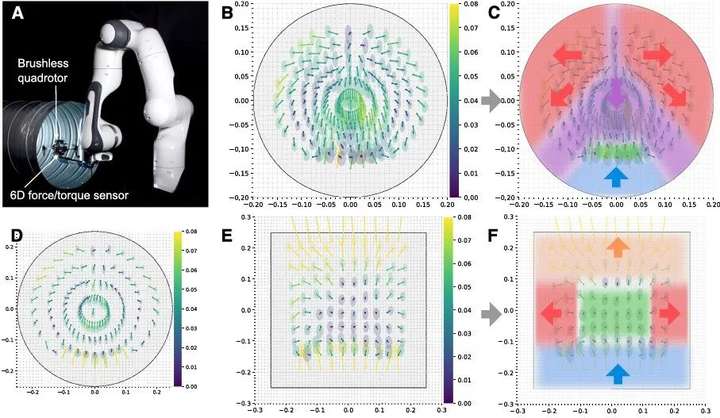
研究团队首先量化旋翼在封闭圆管中的回流气动力,并据此确定最适合悬停的位置。
-
研究团队将安装六维力/矩传感器的无人机模型固定在Franka Panda七轴机械臂末端,在圆管截面定义的192个离散点静止测量气动力差值。
-
基于测量结果,系统绘制了圆形风管截面的扰动力分布图,揭示旋翼回流叠加壁面吸附效应,导致气动力随高度和横向位置呈非均匀分布。
-
数据表明,距管底约10cm处附加力最小,是相对稳定的悬停高度;中心线及靠近顶部位置的扰动显著增大。
图片来源:《Flying in air ducts》,Thomas Martin等,npj Robotics 2025
数据驱动的轻量级定位系统
为解决管道内无纹理、弱光导致的视觉失效问题,论文提出ToF传感器阵列 + 嵌入式MLP的定位方案。
-
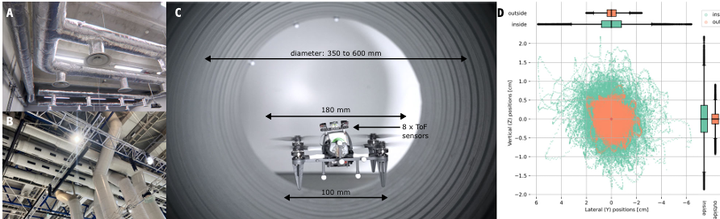
微型ToF传感器阵列:采用9-10个VL53L1X传感器,分别指向无人机周围不同方向,测量无人机与管道壁之间的距离。传感器测距精度高、响应快,且不受光线环境影响。
-
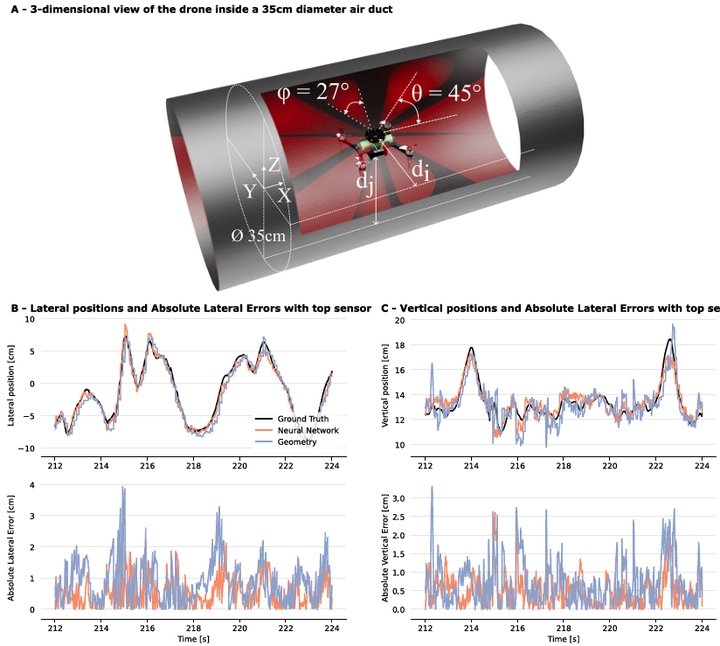
神经网络架构:研究团队构建了一个多层感知机(MLP)模型,通过输入ToF传感器数据、无人机的速度信息以及IMU姿态信息,实时输出无人机在管道截面内的横向和纵向位置。
图片来源:《Flying in air ducts》,Thomas Martin 等,npj Robotics 2025
-
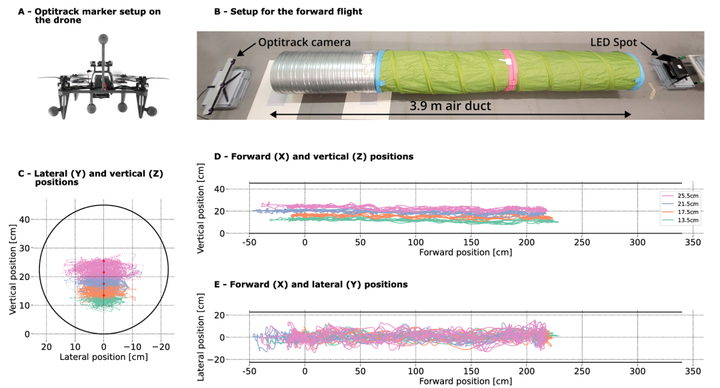
模型训练:利用OptiTrack和HTC Vive Lighthouse系统,采集了长达52分钟的精准飞行数据,构建训练集与测试集,神经网络最终实现定位误差在1厘米以内。
-
边缘计算部署:神经网络经过优化后,可直接部署于无人机搭载的STM32微控制器上,实时性强,延迟低于1毫秒。
03实验测试
研究团队采用了一款整机宽约 18 cm(螺旋桨尖对尖)、高 7.5 cm,含电池总重约130g的微型四旋翼,进行飞行测试。
-
在最优高度(~10cm),无人机在内径35cm的圆管中稳定悬停超过2分钟;
-
在内径45cm、56cm管道中,该神经网络模型表现出良好的泛化能力;
-
在总长3.9m、内径45cm隧道内,执行1.5 m前进后返航(共3m)测试,横向误差<2cm。
图片来源:《Flying in air ducts》,Thomas Martin 等,npj Robotics 2025
资源速递
论文链接:
如果您有感兴趣的技术话题,请在留言区告诉我们!关注阿木实验室,更多技术干货不断更新!
开发遇到棘手难题可以上阿木官方论坛:
bbs.amovlab.com![]() http://bbs.amovlab.com/
http://bbs.amovlab.com/
有工程师亲自解答、10000+无人机开发者和你共同进步!

脑启社区是一个专注类脑智能领域的开发者社区。欢迎加入社区,共建类脑智能生态。社区为开发者提供了丰富的开源类脑工具软件、类脑算法模型及数据集、类脑知识库、类脑技术培训课程以及类脑应用案例等资源。
更多推荐


 21
21 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)