【深度学习优化算法】03:梯度下降
本文讲解梯度下降优化目标函数,关键在于学习率选择,过大会发散,过小会无进展,可能陷入局部极小值,高维模型中调整学习率复杂,预处理有助于调节。

【作者主页】Francek Chen
【专栏介绍】 ⌈ ⌈ ⌈PyTorch深度学习 ⌋ ⌋ ⌋ 深度学习 (DL, Deep Learning) 特指基于深层神经网络模型和方法的机器学习。它是在统计机器学习、人工神经网络等算法模型基础上,结合当代大数据和大算力的发展而发展出来的。深度学习最重要的技术特征是具有自动提取特征的能力。神经网络算法、算力和数据是开展深度学习的三要素。深度学习在计算机视觉、自然语言处理、多模态数据分析、科学探索等领域都取得了很多成果。本专栏介绍基于PyTorch的深度学习算法实现。
【GitCode】专栏资源保存在我的GitCode仓库:https://gitcode.com/Morse_Chen/PyTorch_deep_learning。
尽管梯度下降(gradient descent)很少直接用于深度学习,但了解它是理解下一节随机梯度下降算法的关键。例如,由于学习率过大,优化问题可能会发散,这种现象早已在梯度下降中出现。同样地,预处理(preconditioning)是梯度下降中的一种常用技术,还被沿用到更高级的算法中。让我们从简单的一维梯度下降开始。
一、一维梯度下降
为什么梯度下降算法可以优化目标函数?一维中的梯度下降给我们很好的启发。考虑一类连续可微实值函数 f : R → R f: \mathbb{R} \rightarrow \mathbb{R} f:R→R,利用泰勒展开,我们可以得到
f ( x + ϵ ) = f ( x ) + ϵ f ′ ( x ) + O ( ϵ 2 ) (1) f(x + \epsilon) = f(x) + \epsilon f'(x) + \mathcal{O}(\epsilon^2) \tag{1} f(x+ϵ)=f(x)+ϵf′(x)+O(ϵ2)(1) 即在一阶近似中, f ( x + ϵ ) f(x+\epsilon) f(x+ϵ)可通过 x x x处的函数值 f ( x ) f(x) f(x)和一阶导数 f ′ ( x ) f'(x) f′(x)得出。我们可以假设在负梯度方向上移动的 ϵ \epsilon ϵ会减少 f f f。为了简单起见,我们选择固定步长 η > 0 \eta > 0 η>0,然后取 ϵ = − η f ′ ( x ) \epsilon = -\eta f'(x) ϵ=−ηf′(x)。将其代入泰勒展开式我们可以得到
f ( x − η f ′ ( x ) ) = f ( x ) − η f ′ 2 ( x ) + O ( η 2 f ′ 2 ( x ) ) (2) f(x - \eta f'(x)) = f(x) - \eta f'^2(x) + \mathcal{O}(\eta^2 f'^2(x)) \tag{2} f(x−ηf′(x))=f(x)−ηf′2(x)+O(η2f′2(x))(2)
如果其导数 f ′ ( x ) ≠ 0 f'(x) \neq 0 f′(x)=0没有消失,我们就能继续展开,这是因为 η f ′ 2 ( x ) > 0 \eta f'^2(x)>0 ηf′2(x)>0。此外,我们总是可以令 η \eta η小到足以使高阶项变得不相关。因此,
f ( x − η f ′ ( x ) ) ⪅ f ( x ) (3) f(x - \eta f'(x)) \lessapprox f(x) \tag{3} f(x−ηf′(x))⪅f(x)(3) 这意味着,如果我们使用
x ← x − η f ′ ( x ) (4) x \leftarrow x - \eta f'(x) \tag{4} x←x−ηf′(x)(4) 来迭代 x x x,函数 f ( x ) f(x) f(x)的值可能会下降。因此,在梯度下降中,我们首先选择初始值 x x x和常数 η > 0 \eta > 0 η>0,然后使用它们连续迭代 x x x,直到停止条件达成。例如,当梯度 ∣ f ′ ( x ) ∣ |f'(x)| ∣f′(x)∣的幅度足够小或迭代次数达到某个值时。
下面我们来展示如何实现梯度下降。为了简单起见,我们选用目标函数 f ( x ) = x 2 f(x)=x^2 f(x)=x2。尽管我们知道 x = 0 x=0 x=0时 f ( x ) f(x) f(x)能取得最小值,但我们仍然使用这个简单的函数来观察 x x x的变化。
%matplotlib inline
import numpy as np
import torch
from d2l import torch as d2l
def f(x): # 目标函数
return x ** 2
def f_grad(x): # 目标函数的梯度(导数)
return 2 * x
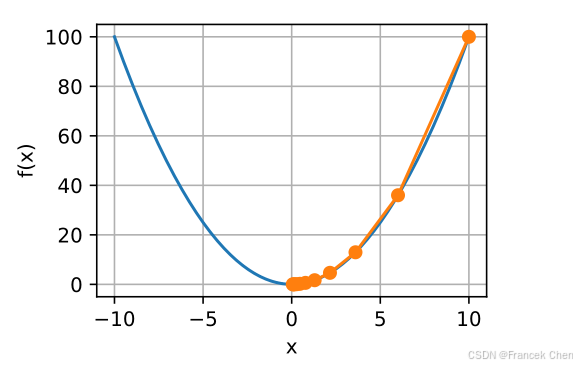
接下来,我们使用 x = 10 x=10 x=10作为初始值,并假设 η = 0.2 \eta=0.2 η=0.2。使用梯度下降法迭代 x x x共10次,我们可以看到, x x x的值最终将接近最优解。
def gd(eta, f_grad):
x = 10.0
results = [x]
for i in range(10):
x -= eta * f_grad(x)
results.append(float(x))
print(f'epoch 10, x: {x:f}')
return results
results = gd(0.2, f_grad)

对进行 x x x优化的过程可以绘制如下。
def show_trace(results, f):
n = max(abs(min(results)), abs(max(results)))
f_line = torch.arange(-n, n, 0.01)
d2l.set_figsize()
d2l.plot([f_line, results], [[f(x) for x in f_line], [
f(x) for x in results]], 'x', 'f(x)', fmts=['-', '-o'])
show_trace(results, f)
(一)学习率
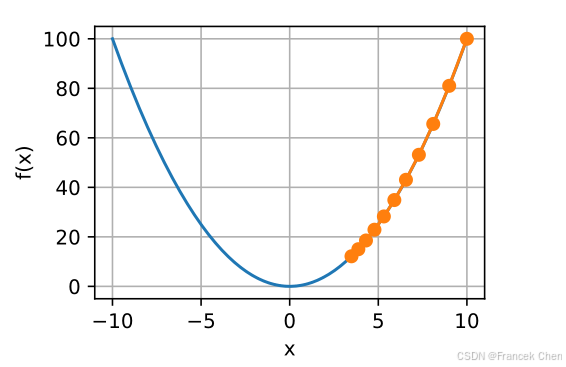
学习率(learning rate)决定目标函数能否收敛到局部最小值,以及何时收敛到最小值。学习率 η \eta η可由算法设计者设置。请注意,如果我们使用的学习率太小,将导致 x x x的更新非常缓慢,需要更多的迭代。例如,考虑同一优化问题中 η = 0.05 \eta = 0.05 η=0.05的进度。如下所示,尽管经过了10个步骤,我们仍然离最优解很远。
show_trace(gd(0.05, f_grad), f)

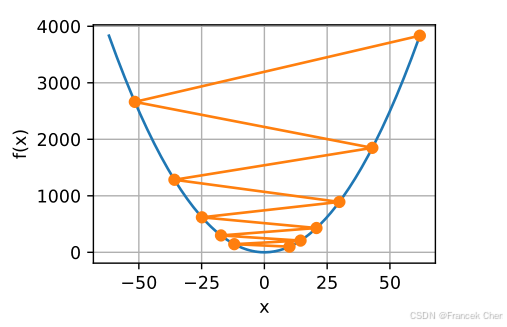
相反,如果我们使用过高的学习率, ∣ η f ′ ( x ) ∣ \left|\eta f'(x)\right| ∣ηf′(x)∣对于一阶泰勒展开式可能太大。也就是说,式(1)中的 O ( η 2 f ′ 2 ( x ) ) \mathcal{O}(\eta^2 f'^2(x)) O(η2f′2(x))可能变得显著了。在这种情况下, x x x的迭代不能保证降低 f ( x ) f(x) f(x)的值。例如,当学习率为 η = 1.1 \eta=1.1 η=1.1时, x x x超出了最优解 x = 0 x=0 x=0并逐渐发散。
show_trace(gd(1.1, f_grad), f)

(二)局部极小值
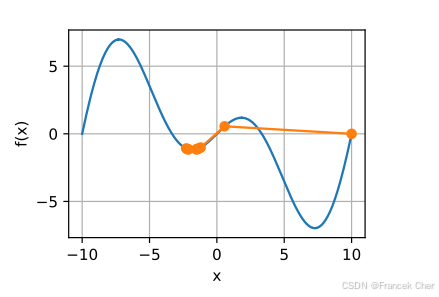
为了演示非凸函数的梯度下降,考虑函数 f ( x ) = x ⋅ cos ( c x ) f(x) = x \cdot \cos(cx) f(x)=x⋅cos(cx),其中 c c c为某常数。这个函数有无穷多个局部极小值。根据我们选择的学习率,我们最终可能只会得到许多解的一个。下面的例子说明了(不切实际的)高学习率如何导致较差的局部最小值。
c = torch.tensor(0.15 * np.pi)
def f(x): # 目标函数
return x * torch.cos(c * x)
def f_grad(x): # 目标函数的梯度
return torch.cos(c * x) - c * x * torch.sin(c * x)
show_trace(gd(2, f_grad), f)

二、多元梯度下降
现在我们对单变量的情况有了更好的理解,让我们考虑一下 x = [ x 1 , x 2 , … , x d ] ⊤ \mathbf{x} = [x_1, x_2, \ldots, x_d]^\top x=[x1,x2,…,xd]⊤的情况。即目标函数 f : R d → R f: \mathbb{R}^d \to \mathbb{R} f:Rd→R将向量映射成标量。相应地,它的梯度也是多元的,它是一个由 d d d个偏导数组成的向量:
∇ f ( x ) = [ ∂ f ( x ) ∂ x 1 , ∂ f ( x ) ∂ x 2 , … , ∂ f ( x ) ∂ x d ] ⊤ (5) \nabla f(\mathbf{x}) = \bigg[\frac{\partial f(\mathbf{x})}{\partial x_1}, \frac{\partial f(\mathbf{x})}{\partial x_2}, \ldots, \frac{\partial f(\mathbf{x})}{\partial x_d}\bigg]^\top \tag{5} ∇f(x)=[∂x1∂f(x),∂x2∂f(x),…,∂xd∂f(x)]⊤(5)
梯度中的每个偏导数元素 ∂ f ( x ) / ∂ x i \partial f(\mathbf{x})/\partial x_i ∂f(x)/∂xi代表了当输入 x i x_i xi时 f f f在 x \mathbf{x} x处的变化率。和先前单变量的情况一样,我们可以对多变量函数使用相应的泰勒近似来思考。具体来说,
f ( x + ϵ ) = f ( x ) + ϵ ⊤ ∇ f ( x ) + O ( ∥ ϵ ∥ 2 ) (6) f(\mathbf{x} + \boldsymbol{\epsilon}) = f(\mathbf{x}) + \mathbf{\boldsymbol{\epsilon}}^\top \nabla f(\mathbf{x}) + \mathcal{O}(\|\boldsymbol{\epsilon}\|^2) \tag{6} f(x+ϵ)=f(x)+ϵ⊤∇f(x)+O(∥ϵ∥2)(6)
换句话说,在 ϵ \boldsymbol{\epsilon} ϵ的二阶项中,最陡下降的方向由负梯度 − ∇ f ( x ) -\nabla f(\mathbf{x}) −∇f(x)得出。选择合适的学习率 η > 0 \eta > 0 η>0来生成典型的梯度下降算法:
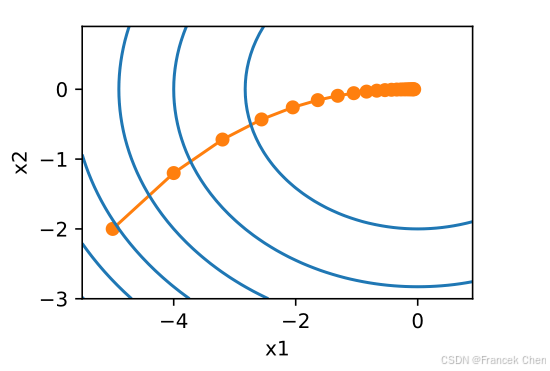
x ← x − η ∇ f ( x ) (7) \mathbf{x} \leftarrow \mathbf{x} - \eta \nabla f(\mathbf{x}) \tag{7} x←x−η∇f(x)(7) 这个算法在实践中的表现如何呢?我们构造一个目标函数 f ( x ) = x 1 2 + 2 x 2 2 f(\mathbf{x})=x_1^2+2x_2^2 f(x)=x12+2x22,并有二维向量 x = [ x 1 , x 2 ] ⊤ \mathbf{x} = [x_1, x_2]^\top x=[x1,x2]⊤作为输入,标量作为输出。梯度由 ∇ f ( x ) = [ 2 x 1 , 4 x 2 ] ⊤ \nabla f(\mathbf{x}) = [2x_1, 4x_2]^\top ∇f(x)=[2x1,4x2]⊤给出。我们将从初始位置 [ − 5 , − 2 ] [-5, -2] [−5,−2]通过梯度下降观察 x \mathbf{x} x的轨迹。
我们还需要两个辅助函数:第一个是update函数,并将其应用于初始值20次;第二个函数会显示 x \mathbf{x} x的轨迹。
def train_2d(trainer, steps=20, f_grad=None): #@save
"""用定制的训练机优化2D目标函数"""
# s1和s2是稍后将使用的内部状态变量
x1, x2, s1, s2 = -5, -2, 0, 0
results = [(x1, x2)]
for i in range(steps):
if f_grad:
x1, x2, s1, s2 = trainer(x1, x2, s1, s2, f_grad)
else:
x1, x2, s1, s2 = trainer(x1, x2, s1, s2)
results.append((x1, x2))
print(f'epoch {i + 1}, x1: {float(x1):f}, x2: {float(x2):f}')
return results
def show_trace_2d(f, results): #@save
"""显示优化过程中2D变量的轨迹"""
d2l.set_figsize()
d2l.plt.plot(*zip(*results), '-o', color='#ff7f0e')
x1, x2 = torch.meshgrid(torch.arange(-5.5, 1.0, 0.1),
torch.arange(-3.0, 1.0, 0.1), indexing='ij')
d2l.plt.contour(x1, x2, f(x1, x2), colors='#1f77b4')
d2l.plt.xlabel('x1')
d2l.plt.ylabel('x2')
接下来,我们观察学习率 η = 0.1 \eta = 0.1 η=0.1时优化变量 x \mathbf{x} x的轨迹。可以看到,经过20步之后, x \mathbf{x} x的值接近其位于 [ 0 , 0 ] [0, 0] [0,0]的最小值。虽然进展相当顺利,但相当缓慢。
def f_2d(x1, x2): # 目标函数
return x1 ** 2 + 2 * x2 ** 2
def f_2d_grad(x1, x2): # 目标函数的梯度
return (2 * x1, 4 * x2)
def gd_2d(x1, x2, s1, s2, f_grad):
g1, g2 = f_grad(x1, x2)
return (x1 - eta * g1, x2 - eta * g2, 0, 0)
eta = 0.1
show_trace_2d(f_2d, train_2d(gd_2d, f_grad=f_2d_grad))

三、自适应方法
正如我们在一维梯度下降中所看到的,选择“恰到好处”的学习率 η \eta η是很棘手的。如果我们把它选得太小,就没有什么进展;如果太大,得到的解就会振荡,甚至可能发散。如果我们可以自动确定 η \eta η,或者完全不必选择学习率,会怎么样?除了考虑目标函数的值和梯度、还考虑它的曲率的二阶方法可以帮我们解决这个问题。虽然由于计算代价的原因,这些方法不能直接应用于深度学习,但它们为如何设计高级优化算法提供了有用的思维直觉,这些算法可以模拟下面概述的算法的许多理想特性。
(一)牛顿法
回顾一些函数 f : R d → R f: \mathbb{R}^d \rightarrow \mathbb{R} f:Rd→R的泰勒展开式,事实上我们可以把它写成
f ( x + ϵ ) = f ( x ) + ϵ ⊤ ∇ f ( x ) + 1 2 ϵ ⊤ ∇ 2 f ( x ) ϵ + O ( ∥ ϵ ∥ 3 ) (8) f(\mathbf{x} + \boldsymbol{\epsilon}) = f(\mathbf{x}) + \boldsymbol{\epsilon}^\top \nabla f(\mathbf{x}) + \frac{1}{2} \boldsymbol{\epsilon}^\top \nabla^2 f(\mathbf{x}) \boldsymbol{\epsilon} + \mathcal{O}(\|\boldsymbol{\epsilon}\|^3) \tag{8} f(x+ϵ)=f(x)+ϵ⊤∇f(x)+21ϵ⊤∇2f(x)ϵ+O(∥ϵ∥3)(8)
为了避免繁琐的符号,我们将 H = d e f ∇ 2 f ( x ) \mathbf{H} \stackrel{\mathrm{def}}{=} \nabla^2 f(\mathbf{x}) H=def∇2f(x)定义为 f f f的黑塞矩阵,是 d × d d \times d d×d矩阵。当 d d d的值很小且问题很简单时, H \mathbf{H} H很容易计算。但是对于深度神经网络而言,考虑到 H \mathbf{H} H可能非常大, O ( d 2 ) \mathcal{O}(d^2) O(d2)个条目的存储代价会很高,此外通过反向传播进行计算可能雪上加霜。然而,我们姑且先忽略这些考量,看看会得到什么算法。
毕竟, f f f的最小值满足 ∇ f = 0 \nabla f = 0 ∇f=0。遵循微积分规则,通过取 ϵ \boldsymbol{\epsilon} ϵ对式(8)的导数,再忽略不重要的高阶项,我们便得到
∇ f ( x ) + H ϵ = 0 且由此, ϵ = − H − 1 ∇ f ( x ) (9) \nabla f(\mathbf{x}) + \mathbf{H} \boldsymbol{\epsilon} = 0 \text{ 且由此,} \boldsymbol{\epsilon} = -\mathbf{H}^{-1} \nabla f(\mathbf{x}) \tag{9} ∇f(x)+Hϵ=0 且由此,ϵ=−H−1∇f(x)(9) 也就是说,作为优化问题的一部分,我们需要将黑塞矩阵 H \mathbf{H} H求逆。
举一个简单的例子,对于 f ( x ) = 1 2 x 2 f(x) = \frac{1}{2} x^2 f(x)=21x2,我们有 ∇ f ( x ) = x \nabla f(x) = x ∇f(x)=x和 H = 1 \mathbf{H} = 1 H=1。因此,对于任何 x x x,我们可以获得 ϵ = − x \epsilon = -x ϵ=−x。换言之,单单一步就足以完美地收敛,而无须任何调整。我们在这里比较幸运:泰勒展开式是确切的,因为 f ( x + ϵ ) = 1 2 x 2 + ϵ x + 1 2 ϵ 2 f(x+\epsilon)= \frac{1}{2} x^2 + \epsilon x + \frac{1}{2} \epsilon^2 f(x+ϵ)=21x2+ϵx+21ϵ2。
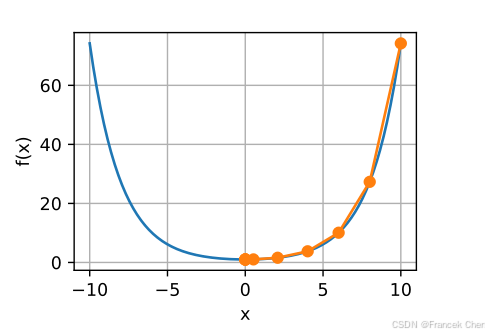
让我们看看其他问题。给定一个凸双曲余弦函数 c c c,其中 c c c为某些常数,我们可以看到经过几次迭代后,得到了 x = 0 x=0 x=0处的全局最小值。
c = torch.tensor(0.5)
def f(x): # O目标函数
return torch.cosh(c * x)
def f_grad(x): # 目标函数的梯度
return c * torch.sinh(c * x)
def f_hess(x): # 目标函数的黑塞矩阵
return c**2 * torch.cosh(c * x)
def newton(eta=1):
x = 10.0
results = [x]
for i in range(10):
x -= eta * f_grad(x) / f_hess(x)
results.append(float(x))
print('epoch 10, x:', x)
return results
show_trace(newton(), f)

现在让我们考虑一个非凸函数,比如 f ( x ) = x cos ( c x ) f(x) = x \cos(c x) f(x)=xcos(cx), c c c为某些常数。请注意在牛顿法中,我们最终将除以黑塞矩阵。这意味着如果二阶导数是负的, f f f的值可能会趋于增加。这是这个算法的致命缺陷!让我们看看实践中会发生什么。
c = torch.tensor(0.15 * np.pi)
def f(x): # 目标函数
return x * torch.cos(c * x)
def f_grad(x): # 目标函数的梯度
return torch.cos(c * x) - c * x * torch.sin(c * x)
def f_hess(x): # 目标函数的黑塞矩阵
return - 2 * c * torch.sin(c * x) - x * c**2 * torch.cos(c * x)
show_trace(newton(), f)

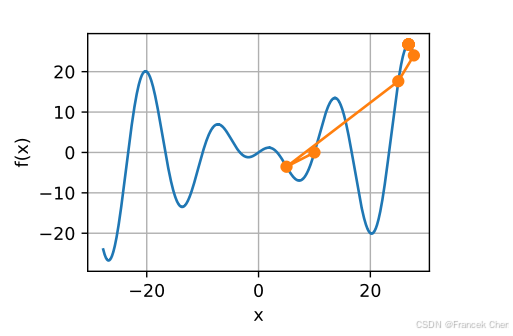
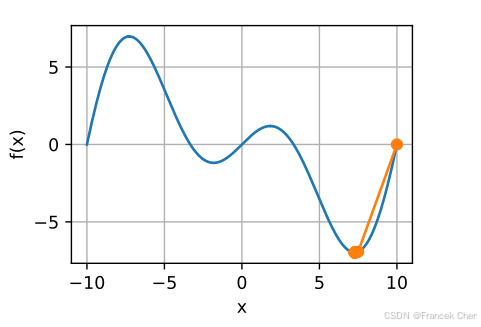
这发生了惊人的错误。我们怎样才能修正它?一种方法是用取黑塞矩阵的绝对值来修正,另一个策略是重新引入学习率。这似乎违背了初衷,但不完全是——拥有二阶信息可以使我们在曲率较大时保持谨慎,而在目标函数较平坦时则采用较大的学习率。让我们看看在学习率稍小的情况下它是如何生效的,比如 η = 0.5 \eta = 0.5 η=0.5。如我们所见,我们有了一个相当高效的算法。
show_trace(newton(0.5), f)

(二)收敛性分析
在此,我们以部分目标凸函数 f f f为例,分析它们的牛顿法收敛速度。这些目标凸函数三次可微,而且二阶导数不为零,即 f ′ ′ > 0 f'' > 0 f′′>0。由于多变量情况下的证明是对以下一维参数情况证明的直接拓展,对我们理解这个问题不能提供更多帮助,因此我们省略了多变量情况的证明。
用 x ( k ) x^{(k)} x(k)表示 x x x在第 k t h k^\mathrm{th} kth次迭代时的值,令 e ( k ) = d e f x ( k ) − x ∗ e^{(k)} \stackrel{\mathrm{def}}{=} x^{(k)} - x^* e(k)=defx(k)−x∗表示 k t h k^\mathrm{th} kth迭代时与最优性的距离。通过泰勒展开,我们得到条件 f ′ ( x ∗ ) = 0 f'(x^*) = 0 f′(x∗)=0可以写成
0 = f ′ ( x ( k ) − e ( k ) ) = f ′ ( x ( k ) ) − e ( k ) f ′ ′ ( x ( k ) ) + 1 2 ( e ( k ) ) 2 f ′ ′ ′ ( ξ ( k ) ) (10) 0 = f'(x^{(k)} - e^{(k)}) = f'(x^{(k)}) - e^{(k)} f''(x^{(k)}) + \frac{1}{2} (e^{(k)})^2 f'''(\xi^{(k)}) \tag{10} 0=f′(x(k)−e(k))=f′(x(k))−e(k)f′′(x(k))+21(e(k))2f′′′(ξ(k))(10) 这对某些 ξ ( k ) ∈ [ x ( k ) − e ( k ) , x ( k ) ] \xi^{(k)} \in [x^{(k)} - e^{(k)}, x^{(k)}] ξ(k)∈[x(k)−e(k),x(k)]成立。将上述展开除以 f ′ ′ ( x ( k ) ) f''(x^{(k)}) f′′(x(k))得到
e ( k ) − f ′ ( x ( k ) ) f ′ ′ ( x ( k ) ) = 1 2 ( e ( k ) ) 2 f ′ ′ ′ ( ξ ( k ) ) f ′ ′ ( x ( k ) ) (11) e^{(k)} - \frac{f'(x^{(k)})}{f''(x^{(k)})} = \frac{1}{2} (e^{(k)})^2 \frac{f'''(\xi^{(k)})}{f''(x^{(k)})} \tag{11} e(k)−f′′(x(k))f′(x(k))=21(e(k))2f′′(x(k))f′′′(ξ(k))(11)
回想之前的方程 x ( k + 1 ) = x ( k ) − f ′ ( x ( k ) ) / f ′ ′ ( x ( k ) ) x^{(k+1)} = x^{(k)} - f'(x^{(k)}) / f''(x^{(k)}) x(k+1)=x(k)−f′(x(k))/f′′(x(k))。代入这个更新方程,取两边的绝对值,我们得到
∣ e ( k + 1 ) ∣ = 1 2 ( e ( k ) ) 2 ∣ f ′ ′ ′ ( ξ ( k ) ) ∣ f ′ ′ ( x ( k ) ) (12) \left|e^{(k+1)}\right| = \frac{1}{2}(e^{(k)})^2 \frac{\left|f'''(\xi^{(k)})\right|}{f''(x^{(k)})} \tag{12}
e(k+1)
=21(e(k))2f′′(x(k))
f′′′(ξ(k))
(12) 因此,每当我们处于有界区域 ∣ f ′ ′ ′ ( ξ ( k ) ) ∣ / ( 2 f ′ ′ ( x ( k ) ) ) ≤ c \left|f'''(\xi^{(k)})\right| / (2f''(x^{(k)})) \leq c
f′′′(ξ(k))
/(2f′′(x(k)))≤c,我们就有一个二次递减误差
∣ e ( k + 1 ) ∣ ≤ c ( e ( k ) ) 2 (13) \left|e^{(k+1)}\right| \leq c (e^{(k)})^2 \tag{13}
e(k+1)
≤c(e(k))2(13)
另一方面,优化研究人员称之为“线性”收敛,而将 ∣ e ( k + 1 ) ∣ ≤ α ∣ e ( k ) ∣ \left|e^{(k+1)}\right| \leq \alpha \left|e^{(k)}\right| e(k+1) ≤α e(k) 这样的条件称为“恒定”收敛速度。请注意,我们无法估计整体收敛的速度,但是一旦我们接近极小值,收敛将变得非常快。另外,这种分析要求 f f f在高阶导数上表现良好,即确保 f f f在如何变化它的值方面没有任何“超常”的特性。
(三)预处理
计算和存储完整的黑塞矩阵非常昂贵,而改善这个问题的一种方法是“预处理”。它回避了计算整个黑塞矩阵,而只计算“对角线”项,即如下的算法更新:
x ← x − η d i a g ( H ) − 1 ∇ f ( x ) (14) \mathbf{x} \leftarrow \mathbf{x} - \eta \mathrm{diag}(\mathbf{H})^{-1} \nabla f(\mathbf{x}) \tag{14} x←x−ηdiag(H)−1∇f(x)(14)
虽然这不如完整的牛顿法精确,但它仍然比不使用要好得多。为什么预处理有效呢?假设一个变量以毫米表示高度,另一个变量以公里表示高度的情况。假设这两种自然尺度都以米为单位,那么我们的参数化就出现了严重的不匹配。幸运的是,使用预处理可以消除这种情况。梯度下降的有效预处理相当于为每个变量选择不同的学习率(矢量 x \mathbf{x} x的坐标)。我们将在后面一节看到,预处理推动了随机梯度下降优化算法的一些创新。
(四)梯度下降和线搜索
梯度下降的一个关键问题是我们可能会超过目标或进展不足,解决这一问题的简单方法是结合使用线搜索和梯度下降。也就是说,我们使用 ∇ f ( x ) \nabla f(\mathbf{x}) ∇f(x)给出的方向,然后进行二分搜索,以确定哪个学习率 η \eta η使 f ( x − η ∇ f ( x ) ) f(\mathbf{x} - \eta \nabla f(\mathbf{x})) f(x−η∇f(x))取最小值。
有关分析和证明,此算法收敛迅速。然而,对深度学习而言,这不太可行。因为线搜索的每一步都需要评估整个数据集上的目标函数,实现它的方式太昂贵了。
小结
- 学习率的大小很重要:学习率太大会使模型发散,学习率太小会没有进展。
- 梯度下降会可能陷入局部极小值,而得不到全局最小值。
- 在高维模型中,调整学习率是很复杂的。
- 预处理有助于调节比例。
- 牛顿法在凸问题中一旦开始正常工作,速度就会快得多。
- 对于非凸问题,不要不作任何调整就使用牛顿法。

脑启社区是一个专注类脑智能领域的开发者社区。欢迎加入社区,共建类脑智能生态。社区为开发者提供了丰富的开源类脑工具软件、类脑算法模型及数据集、类脑知识库、类脑技术培训课程以及类脑应用案例等资源。
更多推荐


 68
68 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)