类脑SLAM的综述——自用仅供参考
脑启发SLAM(同时定位与建图)技术通过模拟大脑的空间导航过程,利用摄像头作为传感器,实现了在未知环境中的定位与地图构建。该技术借鉴了动物导航机制中的网格细胞、位置细胞和头方向细胞等神经生物学理论,通过路径积分、位置编码和方向感知等方式,支持机器人在复杂环境中的导航。脑启发SLAM的实现包括环境感知和空间认知两个主要过程,通过多模态感知信息处理和自组织集群放电机制,结合深度学习、连续吸引子神经网络
1.背景介绍
SLAM的全称是Simultaneous Localization and Mapping,同时定位与建图。这个概念源于移动机器人在未知空间下确定自身位置并建立空间地图的需求。在一些危险、恶劣的环境或者人类难以进入的环境下,能够使用机器人进行作业的前提就是能够同时定位与建图。比如矿井、天然洞穴、战争等环境。
传统的SLAM基于各种传感器,然而由于传感器的昂贵价格及单种传感器使用局限性的限制,脑启发的SLAM技术被提出。其使用摄像头作为传感器,具有价格低廉的优势,通过模拟大脑的空间导航过程实现在各种环境下的定位与建图。脑启发SLAM具有强适应性、成本低廉、低功耗等优势。(下文使用脑启发SLAM代指脑启发的同时定位与建图)
2. 基本原理
接下来将根据检索的文献介绍脑启发SLAM的神经生物学机制以及基于该机制的脑启发SLAM的基本实现方法。
主要神经生物学理论来源于对动物导航机制的研究。网格细胞(Grid Cells)和位置细胞(Place Cells)是大脑空间表征系统中的关键计算单元,它们通过相互作用来支持动物在空间环境中的导航和记忆存储[1]。网格细胞通过路径积分来推断运动,并将信息传递给位置细胞;位置细胞利用网格细胞传递和其他导航细胞的信息确定自身位置并编码。
头方向细胞(Head direction cells)通过其与头部方向相关的放电特性,为动物提供了一种感知环境空间关系的方式——头方向细胞在动物头部指向特定方向时放电最为频繁,这种放电与动物的行为、位置或躯体位置无关。每个头方向细胞都有一个特定的“偏好方向”,在这个方向上细胞的放电率最高[2]。这个放电的方向就是大脑所感知的头朝向的方向。
研究者通过记录蝙蝠在复杂轨迹飞行中朝向空间目标的海马CA1神经元的活动研究蝙蝠海马体细胞对目标的编码机制。发现对目标方向有角度调谐的神经元亚群对被遮挡的目标也有调谐,表明目标方向的表示是基于记忆的而非感官。此外,研究者还发现了一些编码目标距离的细胞,目标方向和目标距离的信号构成了空间目标的向量表示[3]。
脑启发SLAM的实现主要通过脑启发的环境感知机制、空间认知机制实现。
动物依靠各种感觉器官和感觉信息处理机制来感知环境。受大脑启发的环境感知通过借鉴动物感知及其多模态感觉信息处理机制,实现对载体导航信息和周围环境的多维特征提取。受大脑启发的环境感知过程包括环境信息收集和感知信息处理。环境感知信息收集主要来自视觉传感器。在感知信息处理过程中,首先使用各种编码器进行编码,然后对获得的特征进行多模态相关矩阵分析,以获得多模态感知信息[4]。
人脑从外部世界接收信息,对其进行处理,并将其转化为内部神经活动,这些神经活动反过来又指导人类行为。这个过程被称为空间认知过程。脑启发的空间认知借鉴了大脑导航细胞的自组织集群放电机制[5],以实现从基于大脑的环境感知过程中提取的位置和环境信息的导航计算,包括相关记忆、相关信息的存储以及认知地图的构建。其基本原理如图4所示,移动机器人系统将与环境信息相关的多模态感知信息与机器人里程计记录的自我运动信息相关联,使用相关的信息来建模时间序列以获得时空特征,通过PC网络(模拟位置细胞的网络)获得自我位置结果,结合位置信息,并通过GC(模拟网格细胞的网络)和神经网络构建认知地图。自组织集群放电活动的神经计算是基于大脑的空间认知的基础。目前通常使用深度学习(DL)、连续吸引子神经网络(CANN)和脉冲神经网络(SNN)模型来模拟这些导航细胞的功能[4]。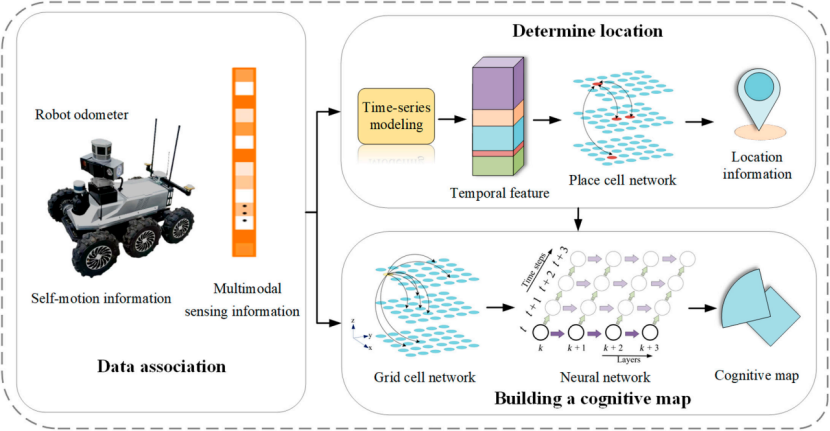
参考文献
[1] MOSER E I, KROPFF E, MOSER M-B. Place Cells, Grid Cells, and the Brain's Spatial Representation System [J]. Annual Review of Neuroscience, 2008, 31(Volume 31, 2008): 69-89.
[2] TAUBE J S, MULLER R U, RANCK J B, JR. Head-direction cells recorded from the postsubiculum in freely moving rats. I. Description and quantitative analysis [J]. J Neurosci, 1990, 10(2): 420-35.
[3] SAREL A, FINKELSTEIN A, LAS L, et al. Vectorial representation of spatial goals in the hippocampus of bats [J]. Science, 2017, 355(6321): 176-80.
[4] BAI Y, SHAO S, ZHANG J, et al. A Review of Brain-Inspired Cognition and Navigation Technology for Mobile Robots [J]. Cyborg and Bionic Systems, 2024, 5: 0128.
[5] BUSH D, BURGESS N. A Hybrid Oscillatory Interference/Continuous Attractor Network Model of Grid Cell Firing [J]. The Journal of Neuroscience, 2014, 34(14): 5065-79.

脑启社区是一个专注类脑智能领域的开发者社区。欢迎加入社区,共建类脑智能生态。社区为开发者提供了丰富的开源类脑工具软件、类脑算法模型及数据集、类脑知识库、类脑技术培训课程以及类脑应用案例等资源。
更多推荐
 11
11 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)