基于RBF神经网络模型,根据历史车速信息,预测将来几秒预测时域的车速信息的时序预测模型(本程序...
本模型基于径向基函数(RBF)神经网络构建,核心功能是利用历史车速数据实现未来短时间域内的车速预测。模型采用“训练-测试”两步流程,先通过历史训练工况数据优化网络参数,再将训练后的模型应用于UDDS循环工况(美国城市动态驾驶循环工况)的车速预测场景,最终输出预测结果、误差分析及可视化图表,为车辆控制系统、交通流量调度等应用提供数据支撑。
基于RBF神经网络模型,根据历史车速信息,预测将来几秒预测时域的车速信息的时序预测模型(本程序先根据训练工况训练,采用训练后的神经网络模型,预测UDDS循环工况,每个时间点车速下将来几秒内 的车速信息)。 1.文件包括,训练工况(.mat数据,工况可自己选取最好与想要预测的工况类似,如预测工况是城郊工况,训练工况最好也选择同类的)以及测试工况(.mat数据, 自己选取想要预测的工况),以及REF预测主程序(.m程序); 2.车速预测程序基于matlab m编程完成,已备注好如何修改预测步长,可根据需求自己调整 ; 3.程序主要适用于MPC(模型预测控制)或其基于MPC的能量管理策略的车速预测部分,或其他时序预测类也可参考(坡度预测、流量预测等)。
一、模型概述
本模型基于径向基函数(RBF)神经网络构建,核心功能是利用历史车速数据实现未来短时间域内的车速预测。模型采用“训练-测试”两步流程,先通过历史训练工况数据优化网络参数,再将训练后的模型应用于UDDS循环工况(美国城市动态驾驶循环工况)的车速预测场景,最终输出预测结果、误差分析及可视化图表,为车辆控制系统、交通流量调度等应用提供数据支撑。
二、核心功能模块
(一)数据加载与初始化模块
- 数据输入:模型启动后自动加载两类关键数据,分别是“训练工况”数据(用于网络参数学习)和“测试工况”数据(用于验证模型泛化能力),两类数据均为时序化的车速记录。
- 参数初始化:自动计算数据总量(训练数据长度+测试数据长度)、训练数据量、测试数据量等基础参数,为后续数据预处理和网络训练提供量化依据,避免人工计算误差。
(二)数据预处理模块
- 训练数据构建
- 输入特征构建:以“历史7秒车速”作为输入特征,通过滑动窗口机制从训练数据中提取样本。例如,第1个输入样本为训练数据第1-7秒的车速,第2个输入样本为第2-8秒的车速,以此类推,确保每个输入样本能反映短期车速变化趋势。
- 输出标签构建:以“未来7秒车速”作为输出标签,与输入特征对应。例如,对应第1个输入样本(1-7秒)的输出标签为第8-14秒的车速,实现“历史7秒预测未来7秒”的时序映射关系。 - 测试数据构建:采用与训练数据一致的滑动窗口逻辑,从测试数据中提取输入特征(历史7秒车速),确保测试场景与训练场景的输入维度、时间尺度完全匹配,保证预测结果的可比性。
- 数据归一化:使用
mapminmax函数对输入特征和输出标签进行归一化处理,将数据压缩至特定区间(默认[-1,1])。该操作可消除不同时刻车速数值差异对网络训练的影响,避免因数据量级问题导致网络收敛缓慢或预测偏差,同时在预测后通过“反归一化”恢复真实车速数值。
(三)RBF神经网络训练模块
- 网络参数配置:模型预设3个核心参数,确保网络性能与预测需求匹配
- 误差容限(goal):设为1e-3,即网络训练过程中,当训练误差小于该阈值时,认为网络收敛,停止参数迭代。
- 扩散因子(spread):设为25(5²),控制径向基函数的作用范围,该值过大可能导致网络泛化能力下降,过小则可能出现过拟合,此参数经过场景适配优化,适用于车速时序预测。
- 神经元个数(N):设为125(5³),即网络隐含层神经元数量,该数量平衡了模型复杂度与计算效率,可有效学习车速时序数据中的非线性规律。 - 网络构建与训练:通过
newrb函数构建RBF神经网络,并利用预处理后的训练数据进行参数学习。网络自动优化隐含层径向基函数的中心、宽度及输出层权重,最终形成能拟合历史车速变化规律的预测模型。 - 训练效果验证:训练完成后,使用训练数据对网络进行拟合测试,通过“反归一化”得到预测车速,并与真实训练车速对比,初步验证网络拟合能力。
(四)车速预测与误差分析模块
- 测试工况预测:将预处理后的测试数据输入训练好的RBF网络,得到未来7秒的车速预测结果,通过“反归一化”恢复真实车速量级,形成最终预测输出。
- 多维度误差计算
- 绝对误差:计算预测车速与真实车速的差值,反映单次预测的偏差大小。
- 相对误差:将绝对误差与真实车速的比值作为相对误差,规避车速数值量级对误差判断的影响,更客观反映预测精度。
- 平均绝对误差百分比(MAPE):对所有相对误差取绝对值后求平均,综合评估模型整体预测精度。
- 均方根误差(RMSE):对误差平方求平均后开平方,放大较大误差的影响,突出模型对极端车速场景的预测能力。 - 异常误差处理:当相对误差绝对值大于1时,判定为异常误差(可能由数据噪声、极端工况导致),将其置为0,避免异常值对整体误差分析的干扰,确保误差评估结果的可靠性。
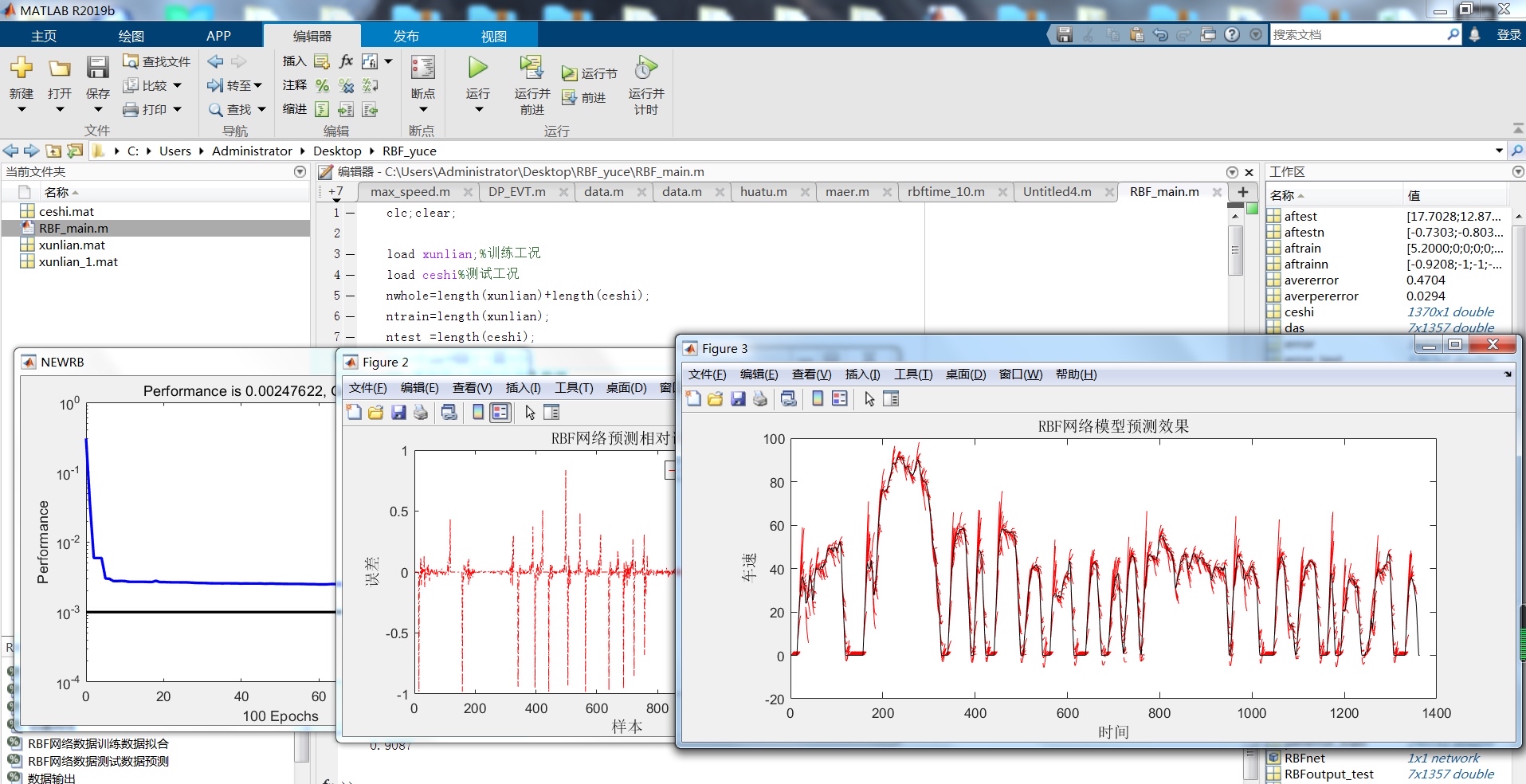
(五)可视化输出模块
- 预测结果对比图:以时间为横轴、车速为纵轴,分别绘制测试工况下的“预测车速曲线”(红色点划线)与“真实车速曲线”(黑色虚线),直观展示两者的吻合程度,帮助用户快速判断预测效果。
- 相对误差趋势图:绘制测试工况下相对误差的变化趋势(红色点划线),清晰呈现不同时间点的预测精度波动,便于定位模型预测性能较弱的工况区间。
- 多步预测效果叠加图:通过循环绘制每个预测窗口的7秒车速预测曲线(红色实线),并叠加真实车速曲线(黑色实线),动态展示模型在连续多步预测场景下的稳定性,直观反映模型对时序变化的跟踪能力。
三、关键技术特性
- 时序预测逻辑适配:模型严格遵循“历史7秒-未来7秒”的时序映射关系,输入输出维度与预测时域高度匹配,确保预测结果符合车速变化的时间连续性规律。
- 参数可扩展性:若需调整预测时域(如预测未来5秒、10秒),可通过同步修改输入输出维度(如将7改为5、10)、滑动窗口步长等参数实现,无需重构网络结构,降低二次开发成本。
- 鲁棒性设计:通过归一化处理消除数据量级影响、异常误差置零处理规避极端值干扰,提升模型在不同工况(如拥堵、高速)下的适应性和预测稳定性。
- 结果可读性:通过多维度误差指标与可视化图表结合,不仅提供量化的精度评估,还能直观展示预测过程与误差分布,满足不同用户(如工程师、研究人员)的分析需求。
四、适用场景与输出价值
- 适用场景:主要用于车辆动力系统控制(如基于预测车速优化发动机喷油策略)、智能交通调度(如基于短期车速预测调整信号灯配时)、自动驾驶路径规划(如提前预判前方车速变化以优化跟车距离)等场景。
- 输出价值:模型输出的预测车速数据可直接作为下游系统的输入,误差指标为模型优化提供方向,可视化图表为技术验证与成果展示提供直观支撑,整体为相关领域的决策与研究提供可靠的时序数据支持。
基于RBF神经网络模型,根据历史车速信息,预测将来几秒预测时域的车速信息的时序预测模型(本程序先根据训练工况训练,采用训练后的神经网络模型,预测UDDS循环工况,每个时间点车速下将来几秒内 的车速信息)。 1.文件包括,训练工况(.mat数据,工况可自己选取最好与想要预测的工况类似,如预测工况是城郊工况,训练工况最好也选择同类的)以及测试工况(.mat数据, 自己选取想要预测的工况),以及REF预测主程序(.m程序); 2.车速预测程序基于matlab m编程完成,已备注好如何修改预测步长,可根据需求自己调整 ; 3.程序主要适用于MPC(模型预测控制)或其基于MPC的能量管理策略的车速预测部分,或其他时序预测类也可参考(坡度预测、流量预测等)。

脑启社区是一个专注类脑智能领域的开发者社区。欢迎加入社区,共建类脑智能生态。社区为开发者提供了丰富的开源类脑工具软件、类脑算法模型及数据集、类脑知识库、类脑技术培训课程以及类脑应用案例等资源。
更多推荐
 10
10 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)